🟡 Step 1 – 更換控制板
為甚麼要更換控制板? 主要有幾個原因:
1. 舊的控制板壞了;
2. 原廠控制板的軟件已經無法在你的電腦正常運作;
3. 舊的紅外線遙控器壞了, 順便改以 PS2 手掣控制 Xero
🟡 Step 2 – 購買替換用的零件
確定要更換控制板的話, 以下是一些建議:
1. 控制板要有 24 個 PWM Servo 用的 Pin;
2. 控制板要有連接遙控手掣的機制;
3. 控制板最好有跟其他 MCU 通訊的端子(例如 I2C, SPI, UART 之類);
4. 輸出至 Servo Pin 的電壓電流要符合需求;
5. 控制板要放得進 Xero 的背包內;
6. 電池要放得進 Xero 的心口;
7. 附送編寫動作用的軟件
巿面上應該有很多方案可以符合到要求, 不過 Jason 也為大家找了一套合適而且測試過可用的方案:


🟡 Step 3 – 替換控制板
如果大家不像 Jason 一樣變態非要拆散整台機再重裝的話, 其實整個換板過程大約一小時內搞得定:
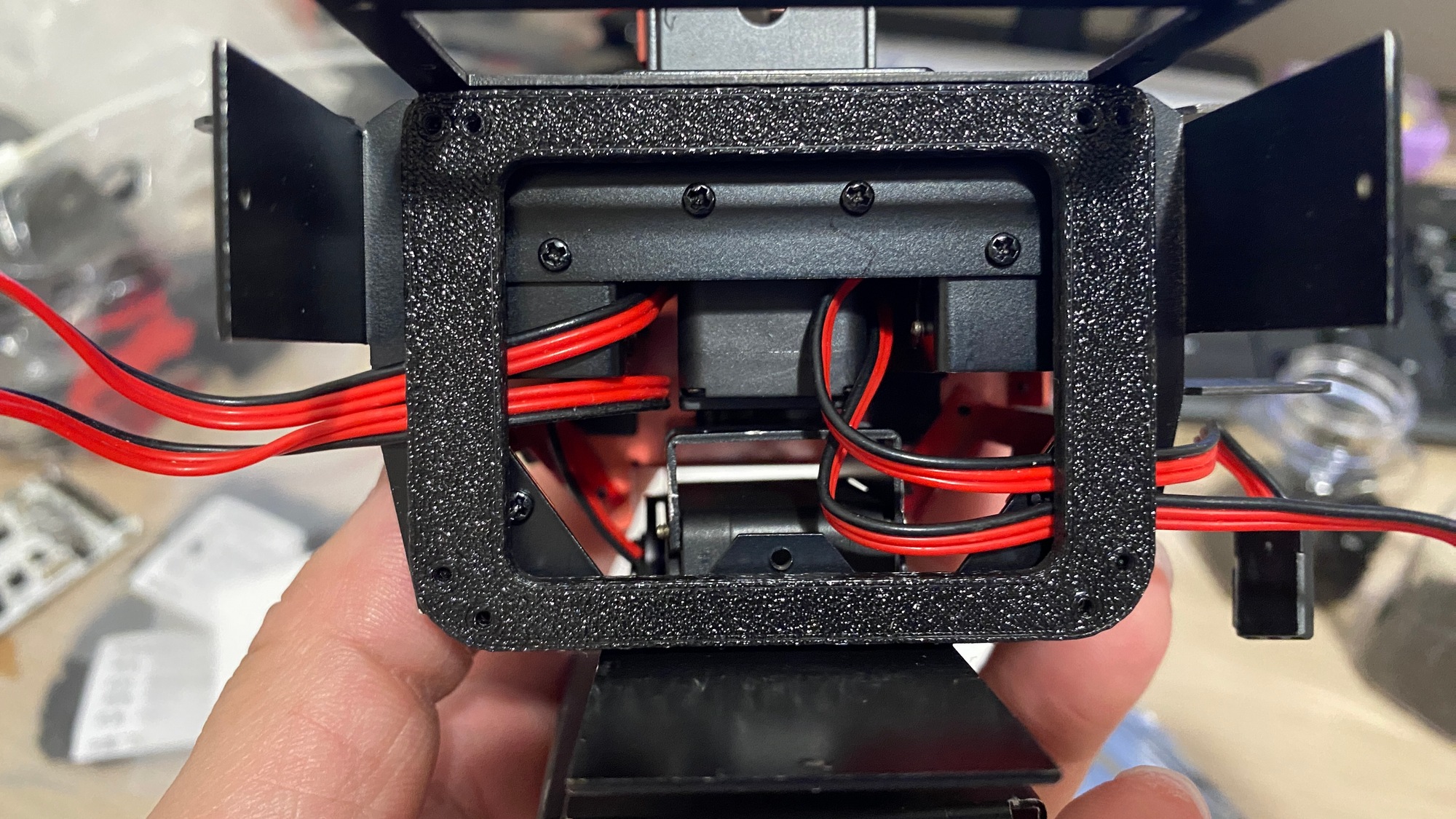
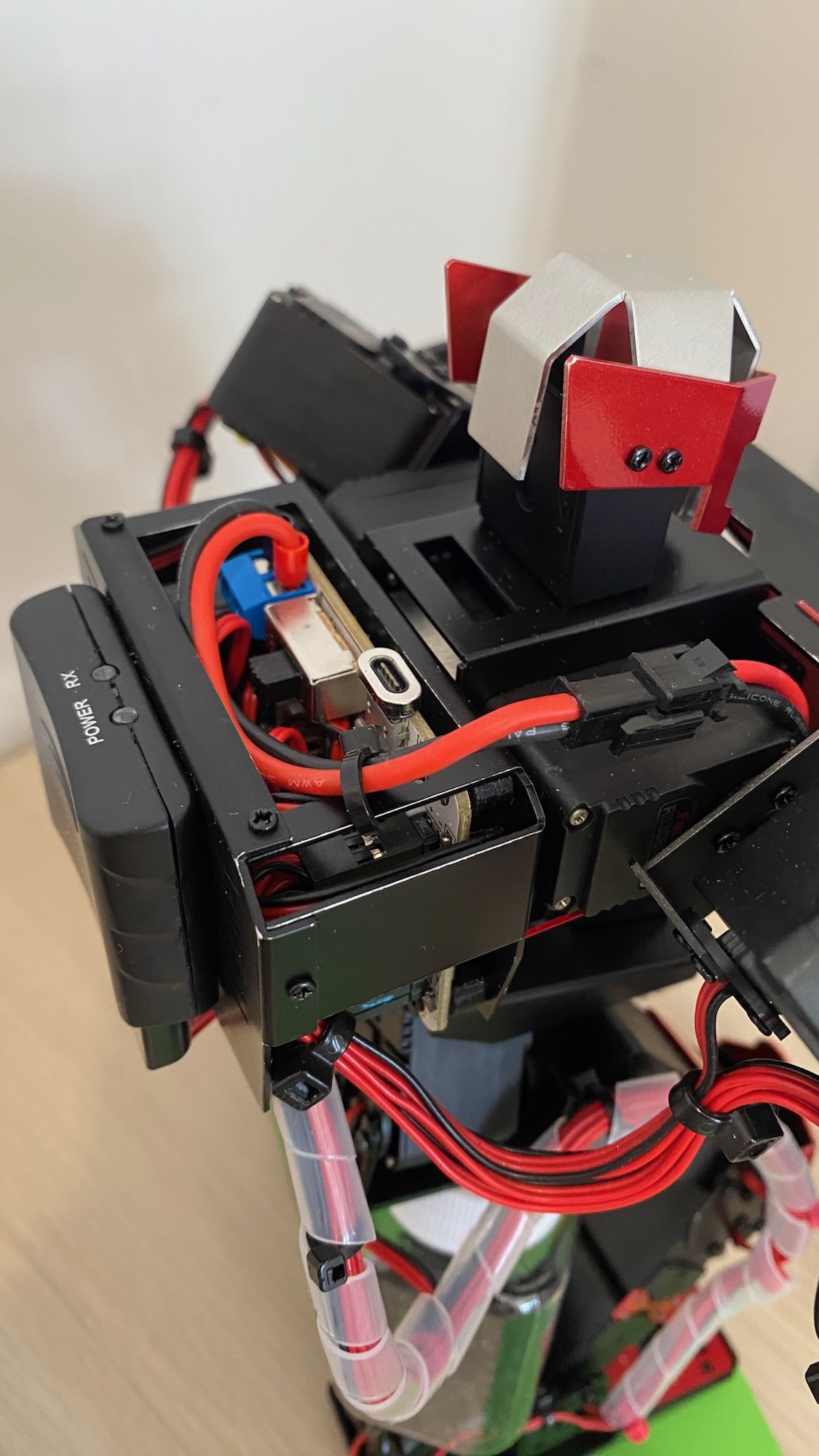
1. 小心拔起各 Servo 電線及拆走舊的控制板;
2. 由於新舊板之間的螺絲孔位置不同, 可自行設計轉換組件或許簡單一點用 2mm 厚的納米膠紙將新板貼在背包內也可;
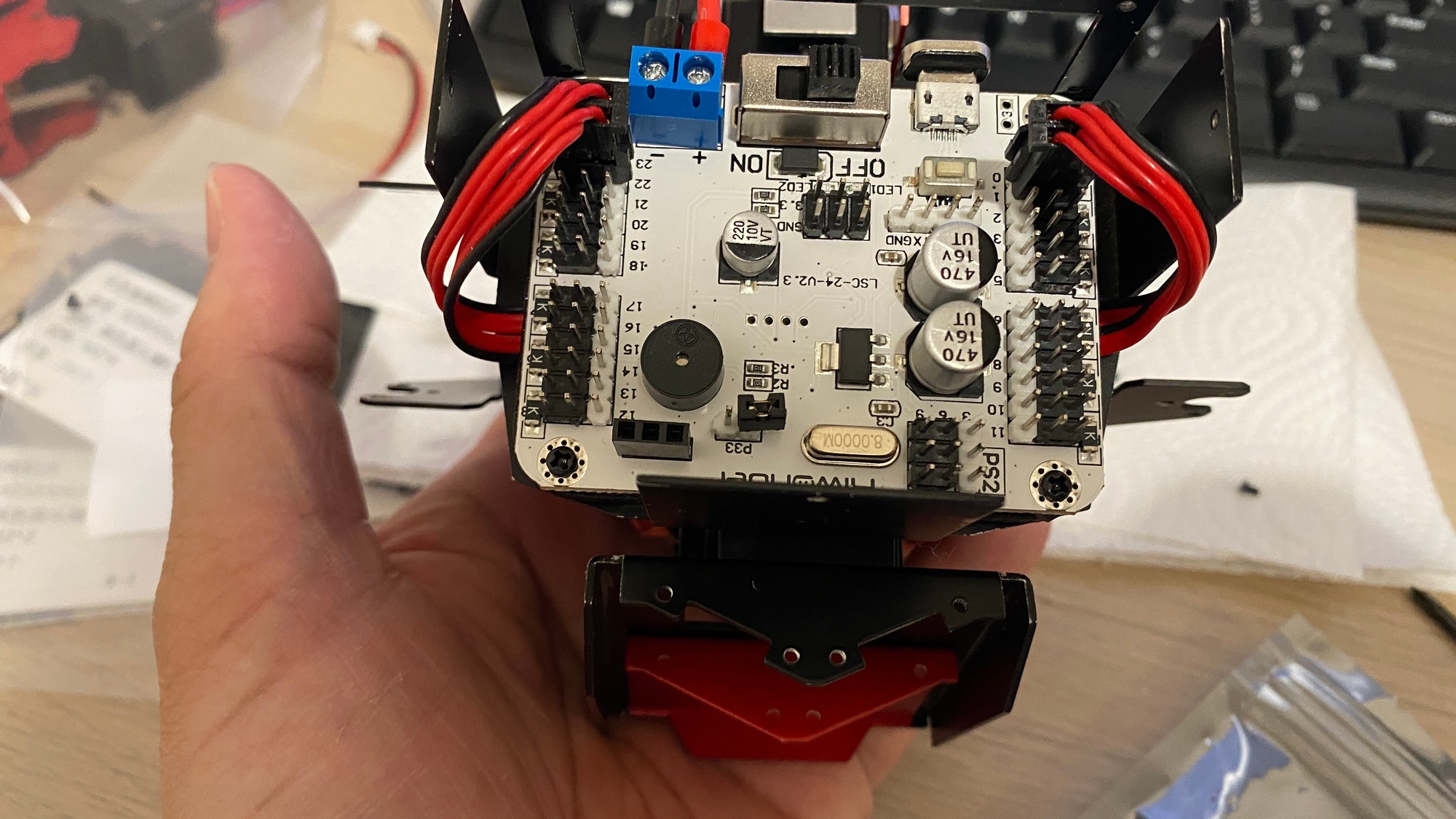
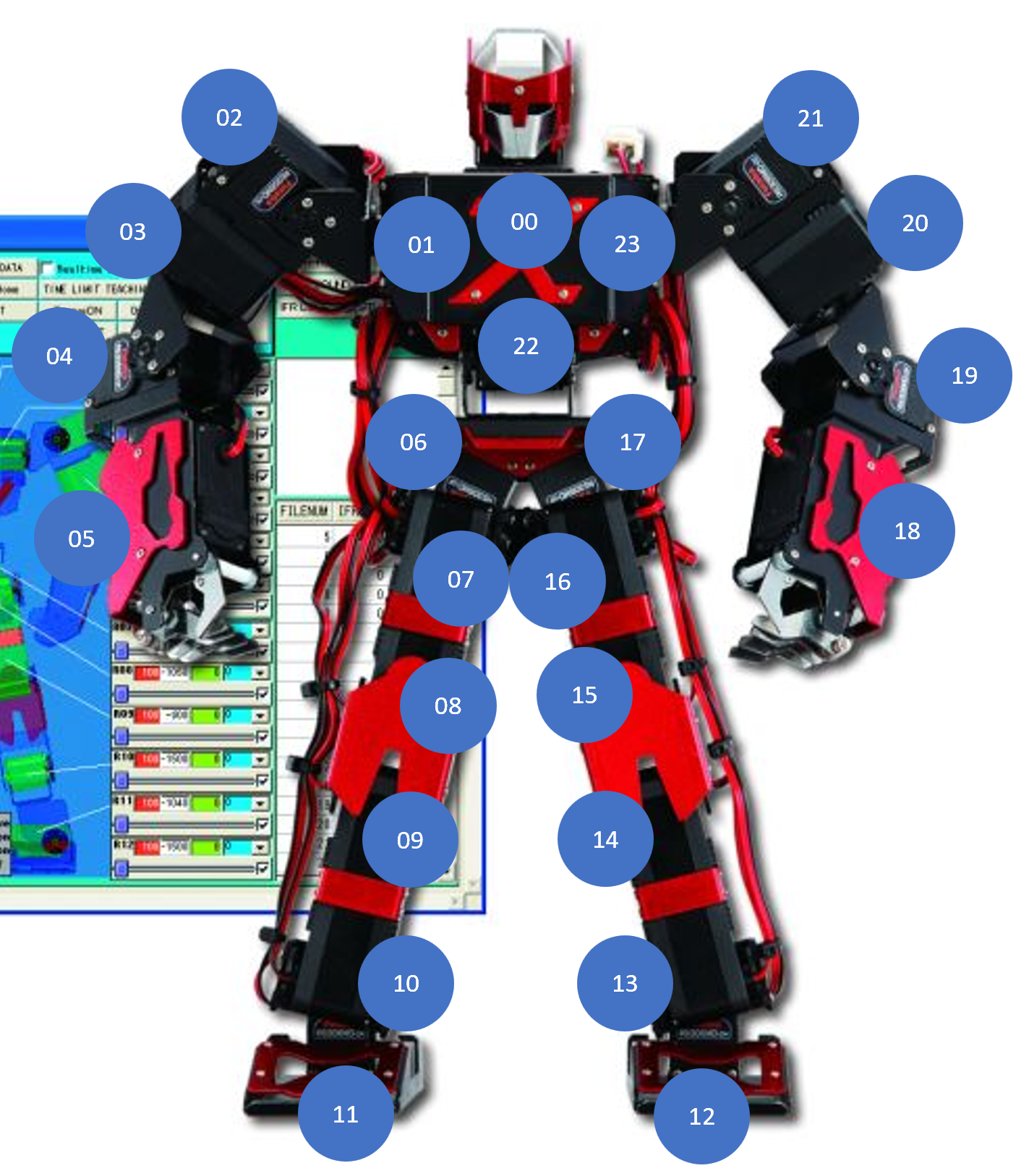
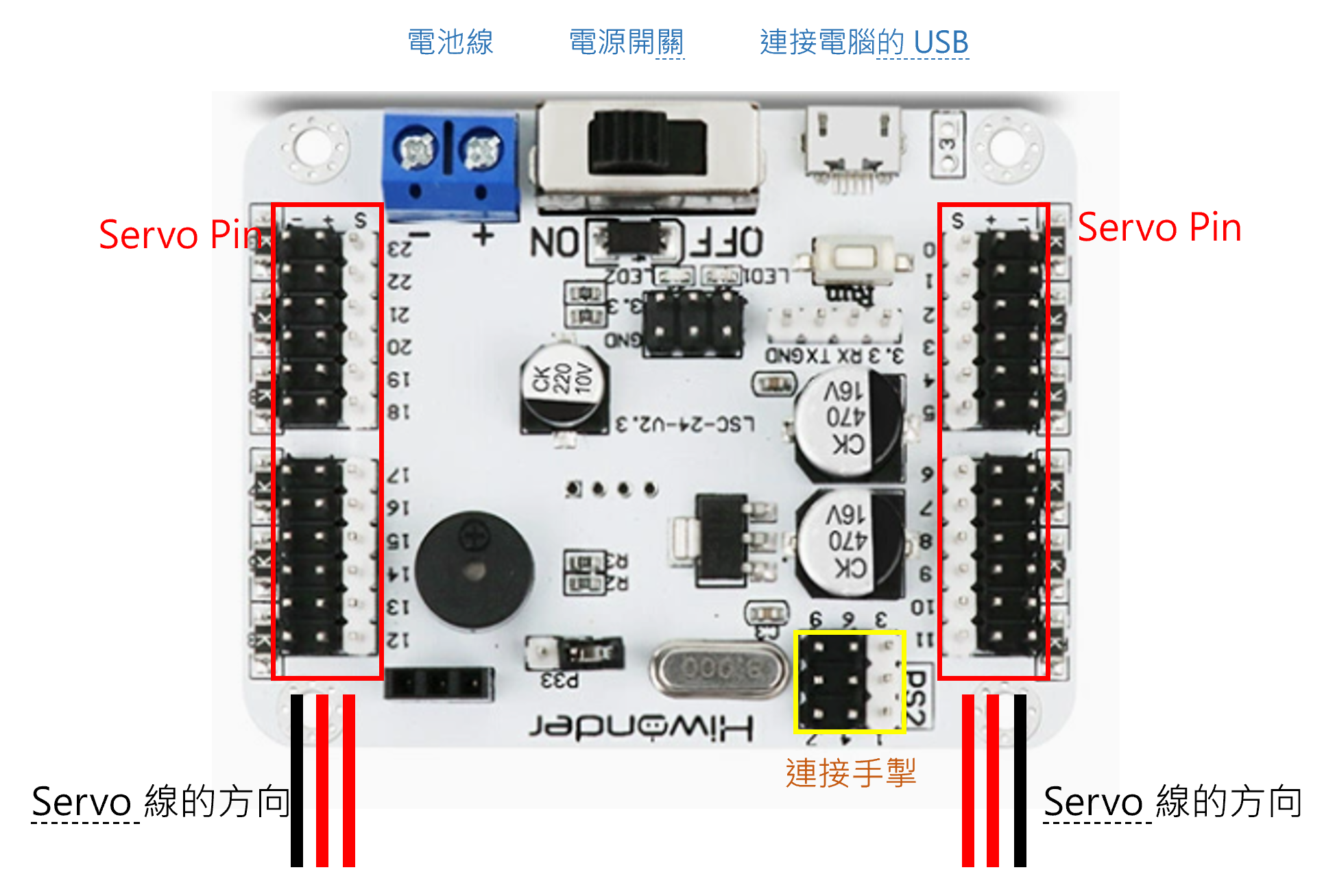
3. 新板左右兩邊有 0-23 號 Pin, 請根據下面的 Servo Pin 圖重新插回便可;
4. 插 Servo 線時留意方向
🟡 Step 4 – 安裝手掣接收器
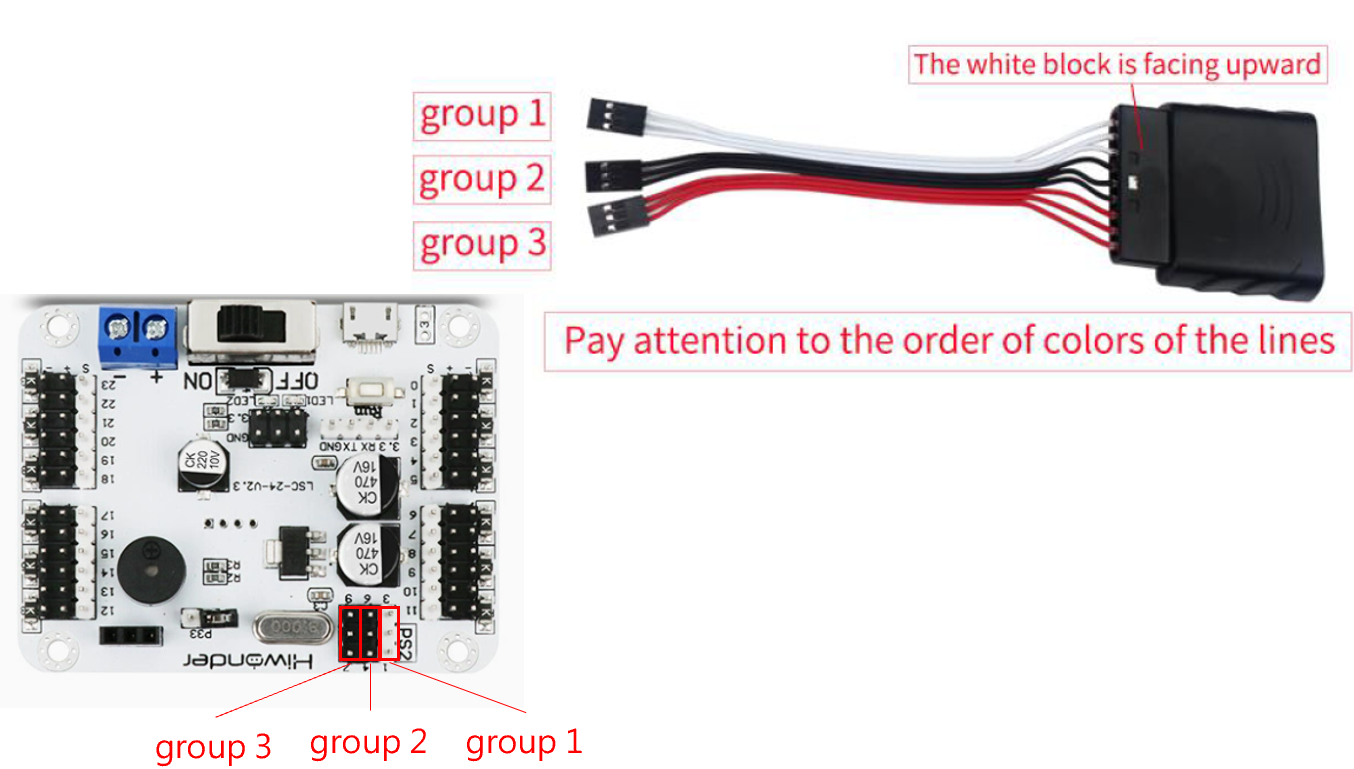
最後要安裝的就是手掣的接收器, 以下是一些需要留意的地方:
1. 接收器會有白黑紅三組線引出來, 每一組線未必有齊三條芯的, 但不會應響安裝;
2. 根據下圖將 group 1 2 3 的線插回對應的位置, 沒有正反面之分
🟡 Step 5 – 下載並安裝動作編輯軟件 (For Windows)
請到 https://www.hiwonder.com.cn/store/learn/23.html 下載控制板的軟件、說明書以及範例。
下載回來後解壓縮, 然後尋找一個叫 Hiwonder Servo Control Steup 的程式並執行它, 安裝的過程太簡單所以不累述了。
留意, 在 Hiwonder Servo Control Steup 這個程式的同一個資料夾內有另一個檔案叫 ch341ser, 這是控制板的 USB Driver, 也可以先安裝一下。

🟡 Step 6 – 動作編輯軟件
1. 請開啟已安裝好的 Hiwonder Servo Control 軟件;
2. 用 USB 線將控制板連接到你的電腦;
3. 確保電池已連接控制板然後開啟板上的電源;
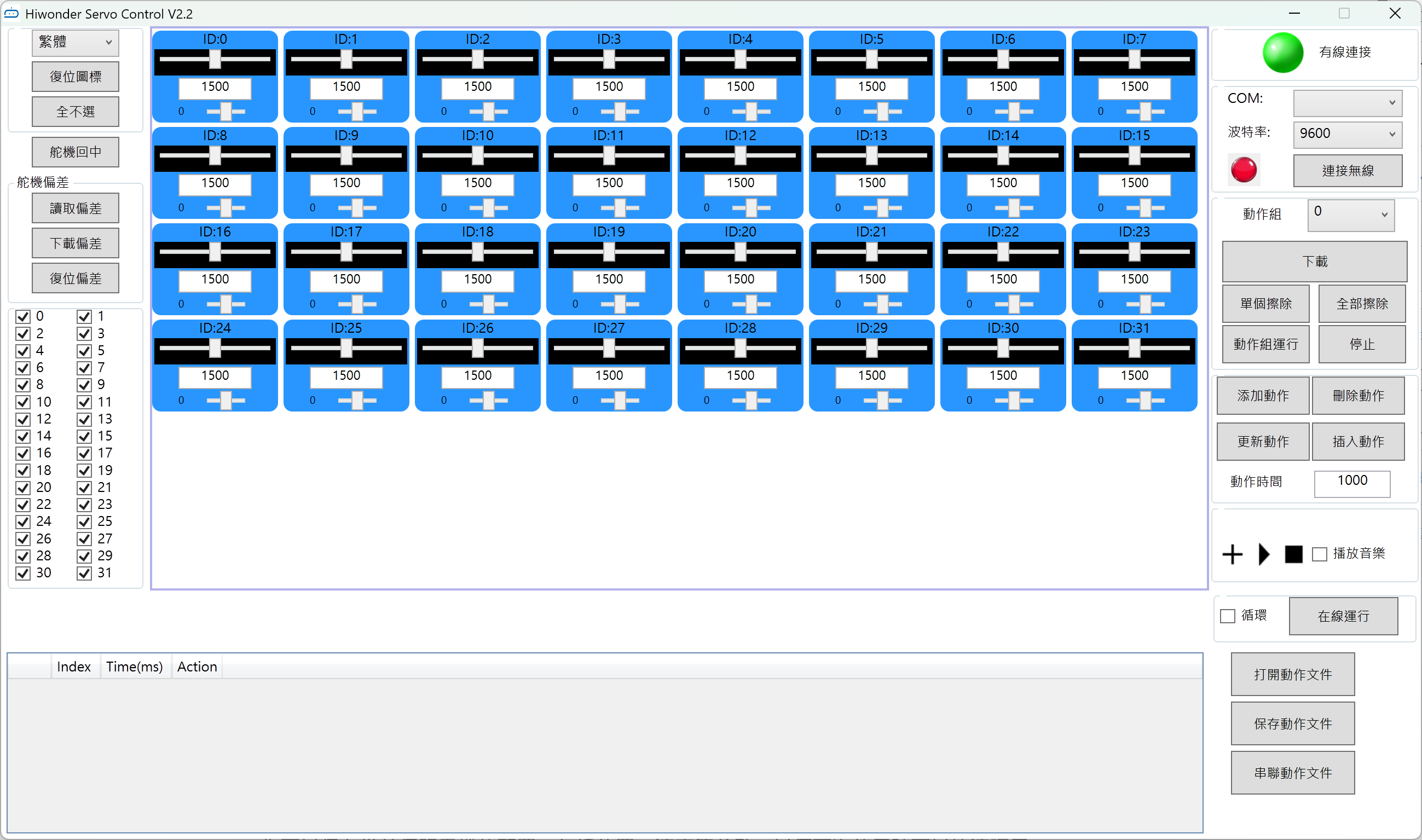
4. 如果連線上沒有問題就會看到右上角的紅色燈號轉為綠色;
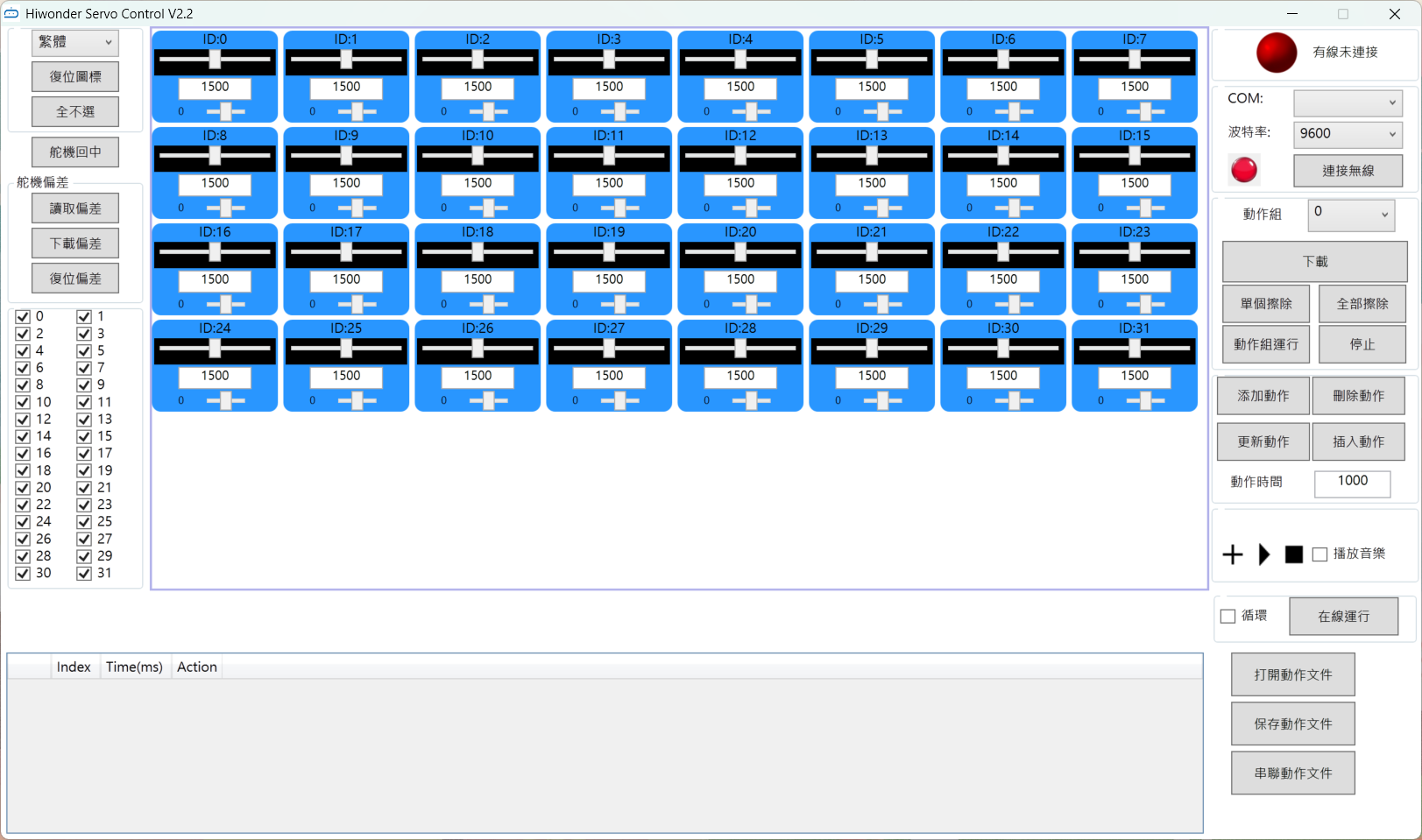
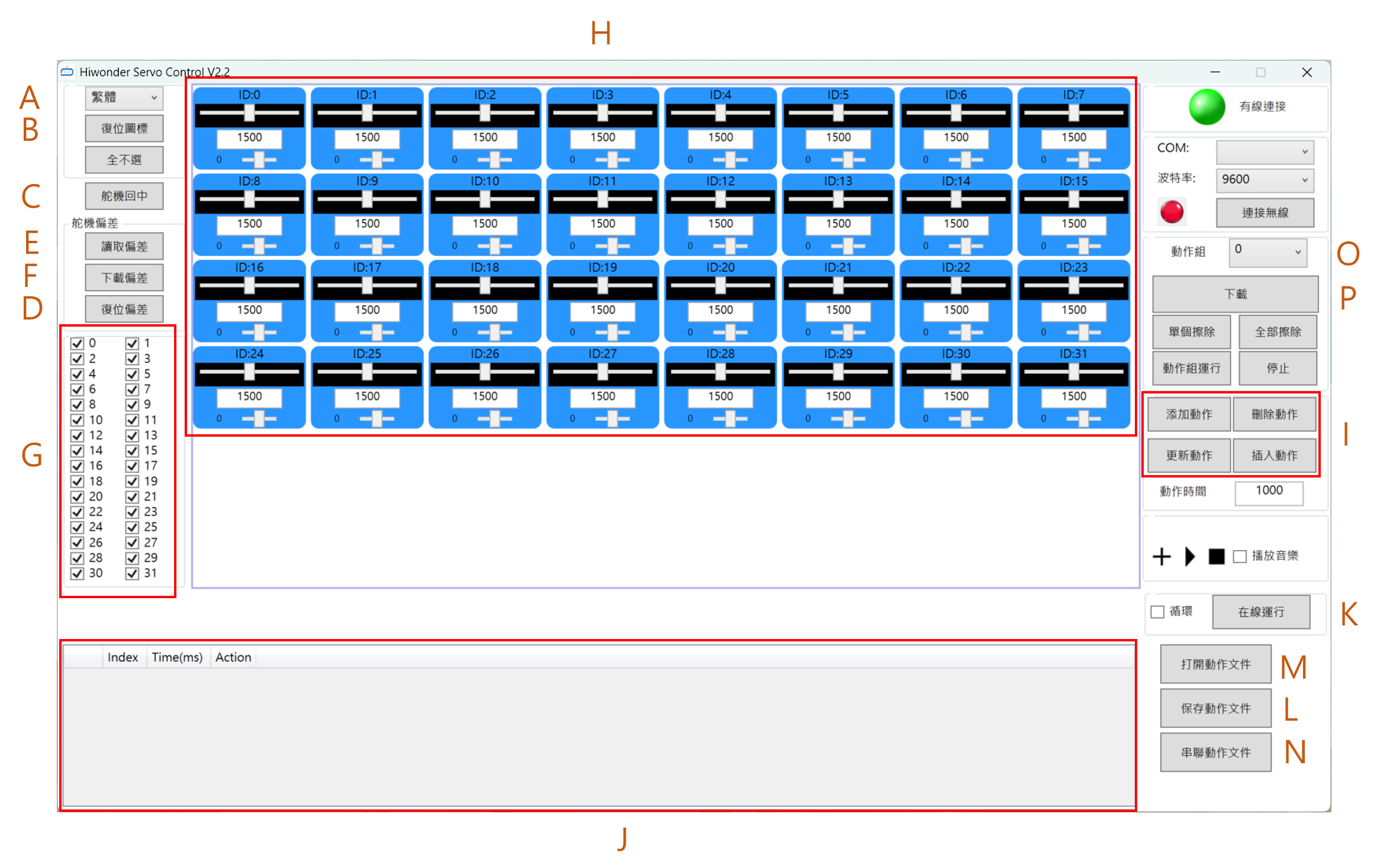
5. 接著就為大家根據使用順序逐項介紹一下:
A. 首先選擇你想用的語言;
B. 用來還原畫面中間一堆藍色用作調整 Servo 角度的東西的位置;
C. 用來將所有舵機一次過調回中央位置 (1500), 建議先逐個 Servo 試清楚 1500 會不會有碰撞, 確定全部 Servo 都沒問題才按這個「舵機回中」吧;
D. 每一顆 Servo 在組裝後或多或少都會出現偏差, 大家可以透過改變藍色格下方的偏差值來修正, 建議剛裝好的控制板都復位一次, 清乾淨各 Servo 的偏差值, 然後才調校;
F. 調校好偏差值後先按「下載偏差」將資料存到控制板上, 否則下次連接又要重新調校過了哦!
E. 在下次編輯動作時可按「讀取偏差」從控制板讀取偏差資料;
G. 在這裏如果你只連接了 24 顆 Servo 的話, 只需掦 0-23 便可;
H. 這些就是 Servo 角度控制方塊, 只要拖動滑桿就可以改變 Servo 的角度, 建議不要一下子推太多, 以免撞壞 Servo 或五金零件;
I. 在調整好各 Servo 角度後, 便可以在 I 區作操作, 例如將現有數據添加做新的 Pose, 更新、插入、刪除就自己研究一下如何運用吧;
J. 當有很多個 Pose 就可以成為一連串的動作, 這裏就會顯示現時已編好的 Pose 以及每個 Pose 的運行時間;
K. 當設定好幾個 Pose 想測試串在一起的效果如何就可以按「在線運行」;
L. 儲存起動作檔是非常重要, 記得常儲存以及儲存多個版本;
M. 這是用來打開你曾經儲存過的動作檔;
O. 當你覺得動作檔完成了想放到控制板內, 讓手掣按某個鍵便會執行時, 請根據你想要的手掣按鍵或組合選擇「動作組」, 例如想在手掣按下 Start 按鈕運行當前的動作檔, 請先選擇 0, 然後按 P 位置的「下載」
以下是動作組編號所對應的手掣按鈕:
0 Start
1 Up
2 Down
3 Left
4 Right
5 上Y (△)
6 下A (X)
7 左X (□)
8 右B (○)
9 L1
10 R1
11 L2
12 R2
13 Select + 上Y (△)
14 Select + 下A (X)
15 Select + 左X (□)
16 Select + 右B (○)
17 Select + L1
18 Select + R1
19 Select + L2
20 Select + R2
🟡 Step 7 – 用手掣控制機械人
終於來到最後最簡單的部份, 首先打開機械人及手掣的電源, 會自動配對。
然後按手掣上的不同按鈕, 享受一下製作機械人的樂趣吧!