🟡 Day01 – 8 Mar 2025
在一次機緣巧合下,終於入手了這台心心念念了很多很多年的超級終極秘寶 Robo Xero!
不過暫時未知各部零件狀態如何,只要servo 還能動,Jason Workshop 的修復玩具真人 Show 就會展開!
* 感謝活動搞手 Larry 以及 Toy Zone 老闆割愛,為了感謝大家的幫忙我就要展開這個企劃了。我會將修理的考量、進度以及方法都公開,希望可以讓更多朋友也可以嘗試修復一些珍藏玩具吧!

🟧 修復前的重要工作是要作一些調查,當中包括:
1. 機體本身重量為 950g (在改造的過程確保不能大幅改變機體重量)
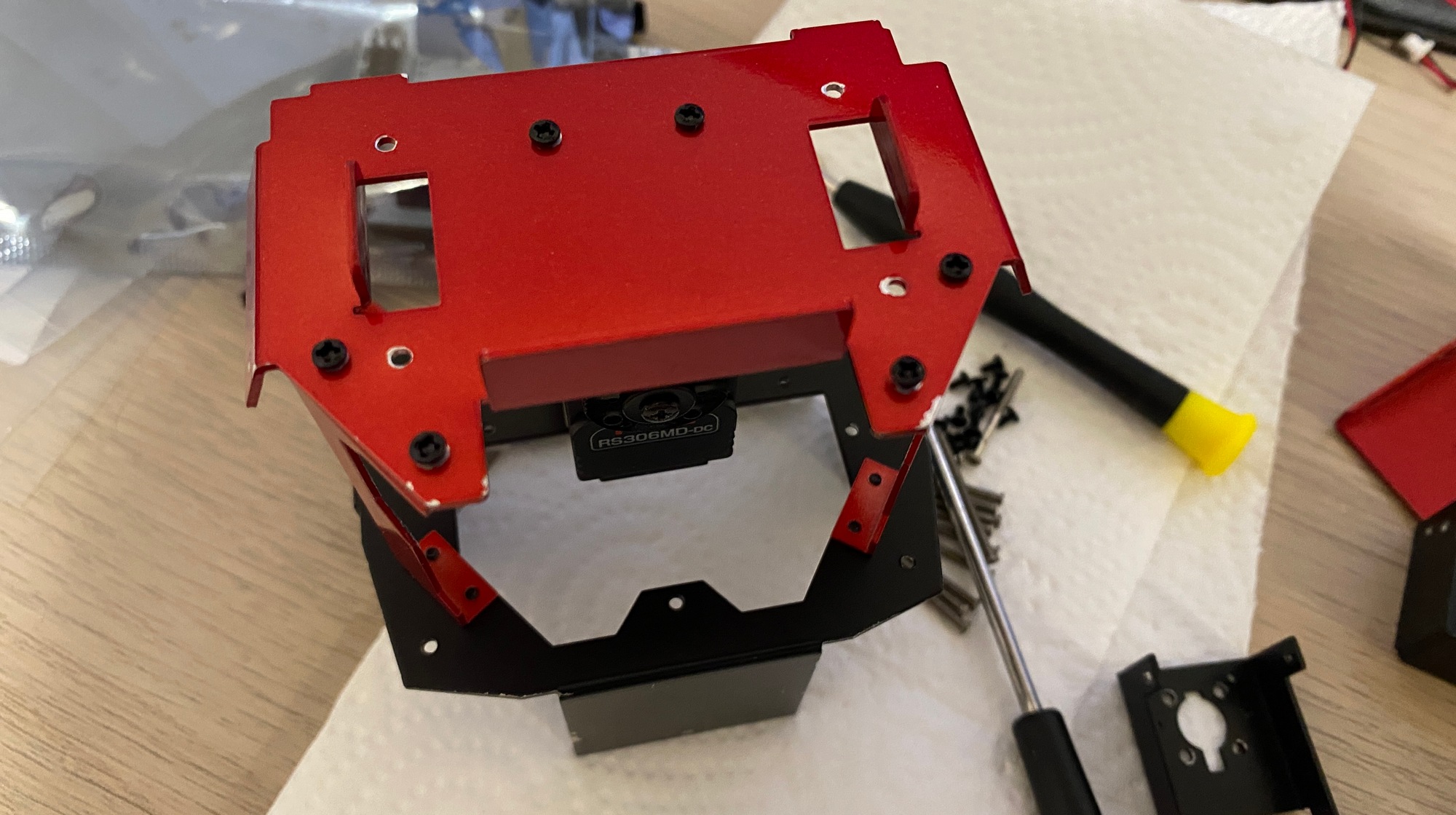
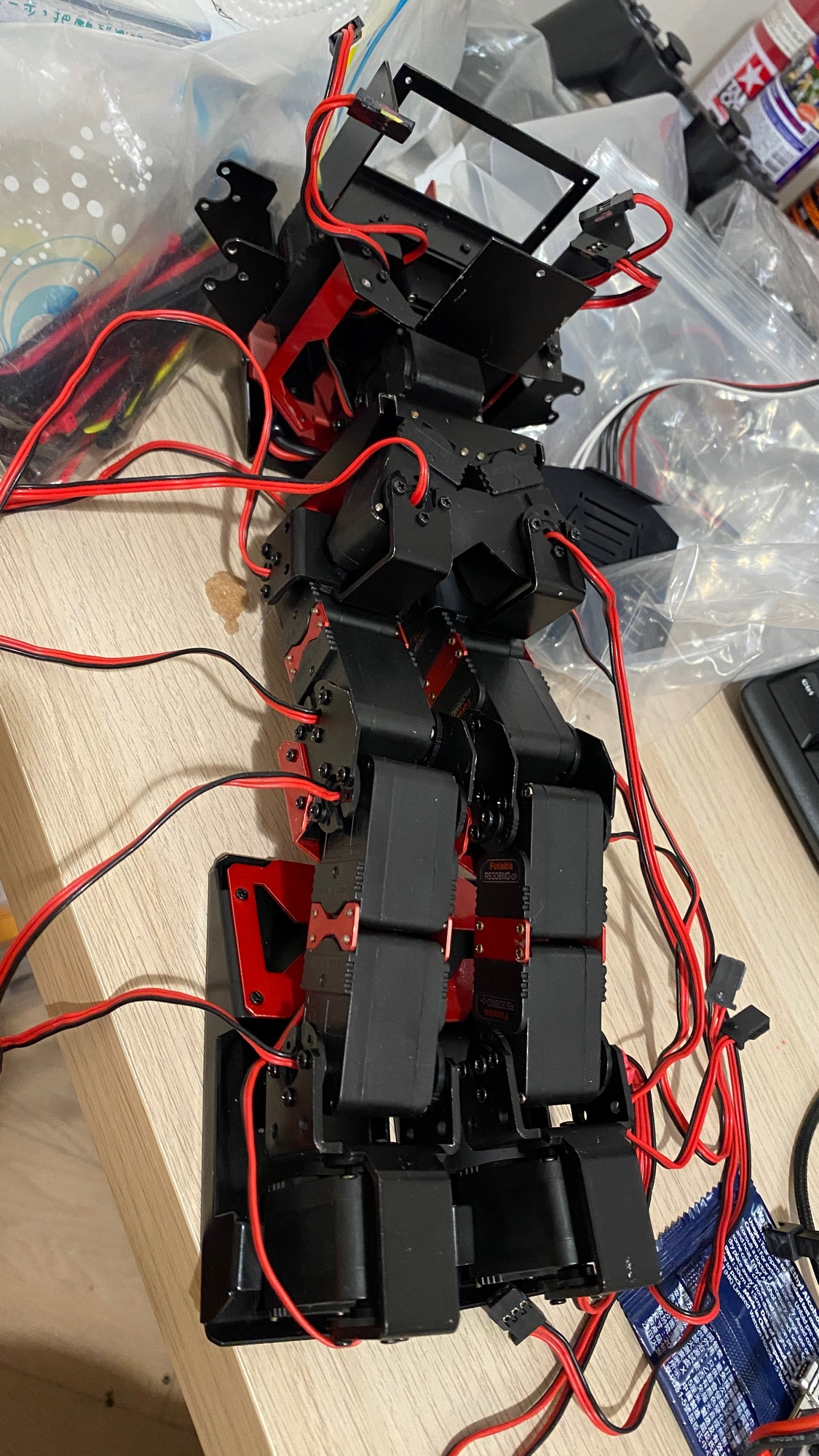
2. 機體所使用的 Servo 的特性,這台機體用了三種 Servo,應該是訂製版的 Futaba RS306MD-DC, DF, DF 暫時不太清楚兩者的分別,較有可能的是扭力、可動角度或線長吧…
3. Servo 電壓 4.8V – 7.4V,扭力 5kgf.cm (以差不多體積 Servo 來說算很強了),可動角度 300 度,能以 PWM 作控制訊號也是一個令人雀躍的好消息,因為這代表比較容易找到替代控制板。
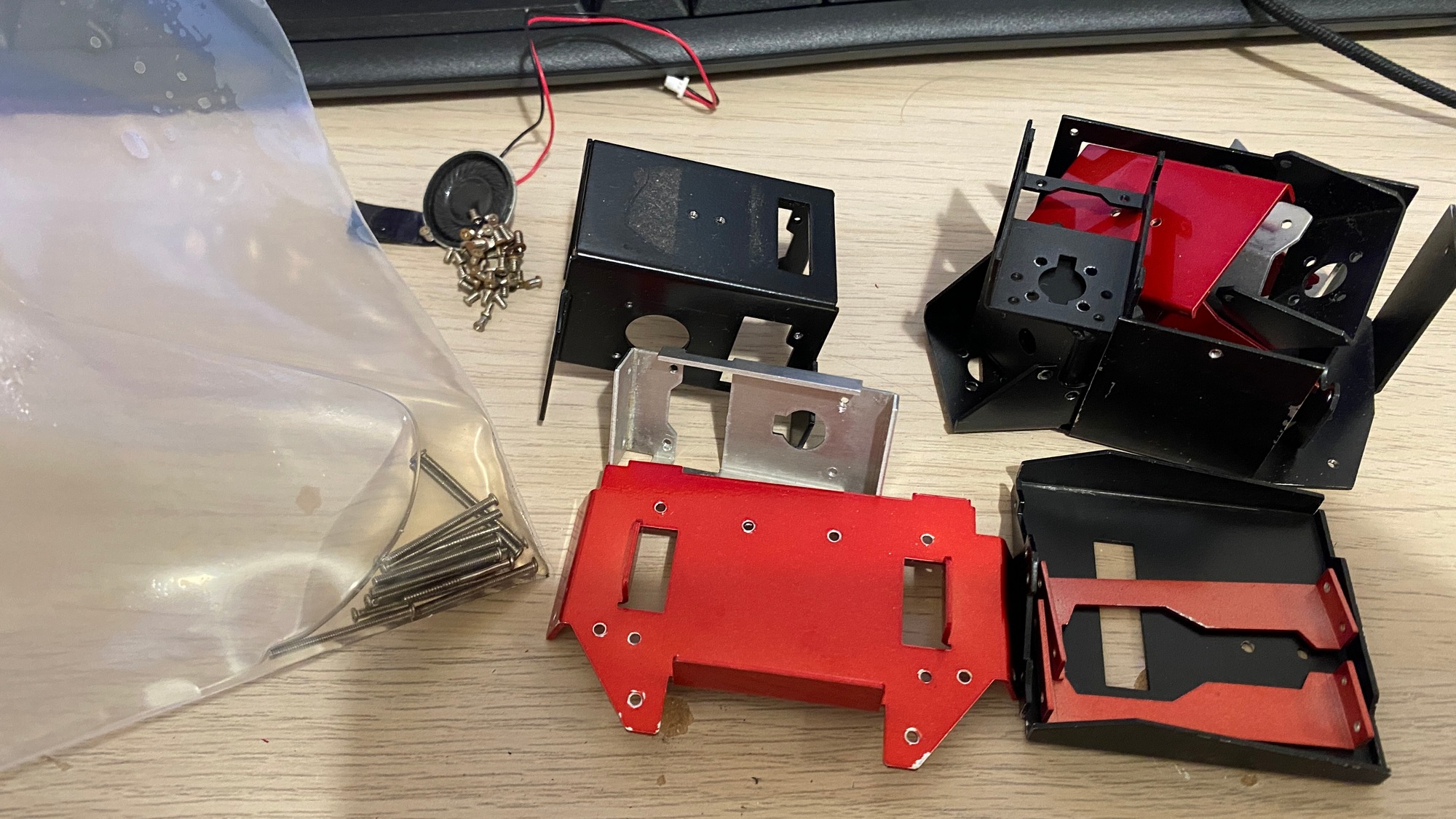
4. 螺絲方面也有生銹的情況,不過應該可以用除銹劑處理的,審慎起見,也訂了一些 M1.7, M2 各式長度機牙螺絲備用。

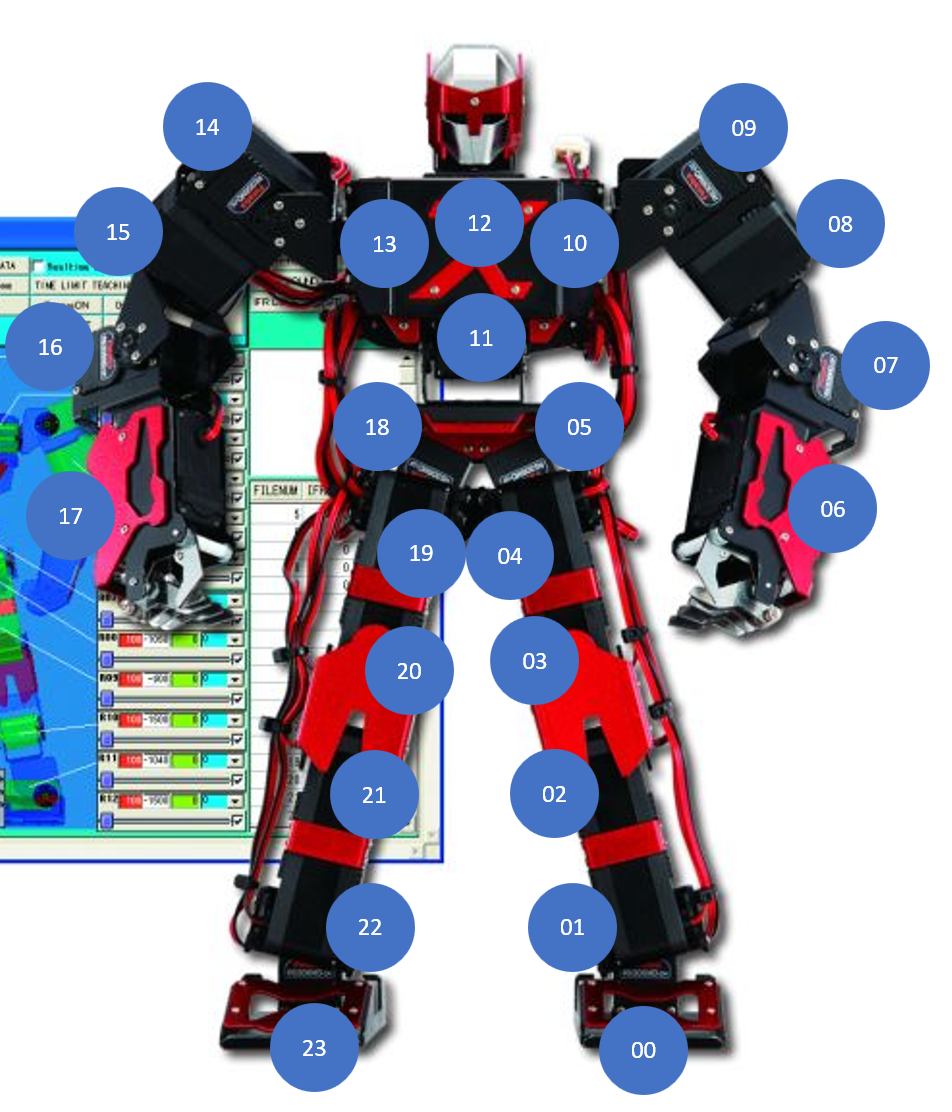
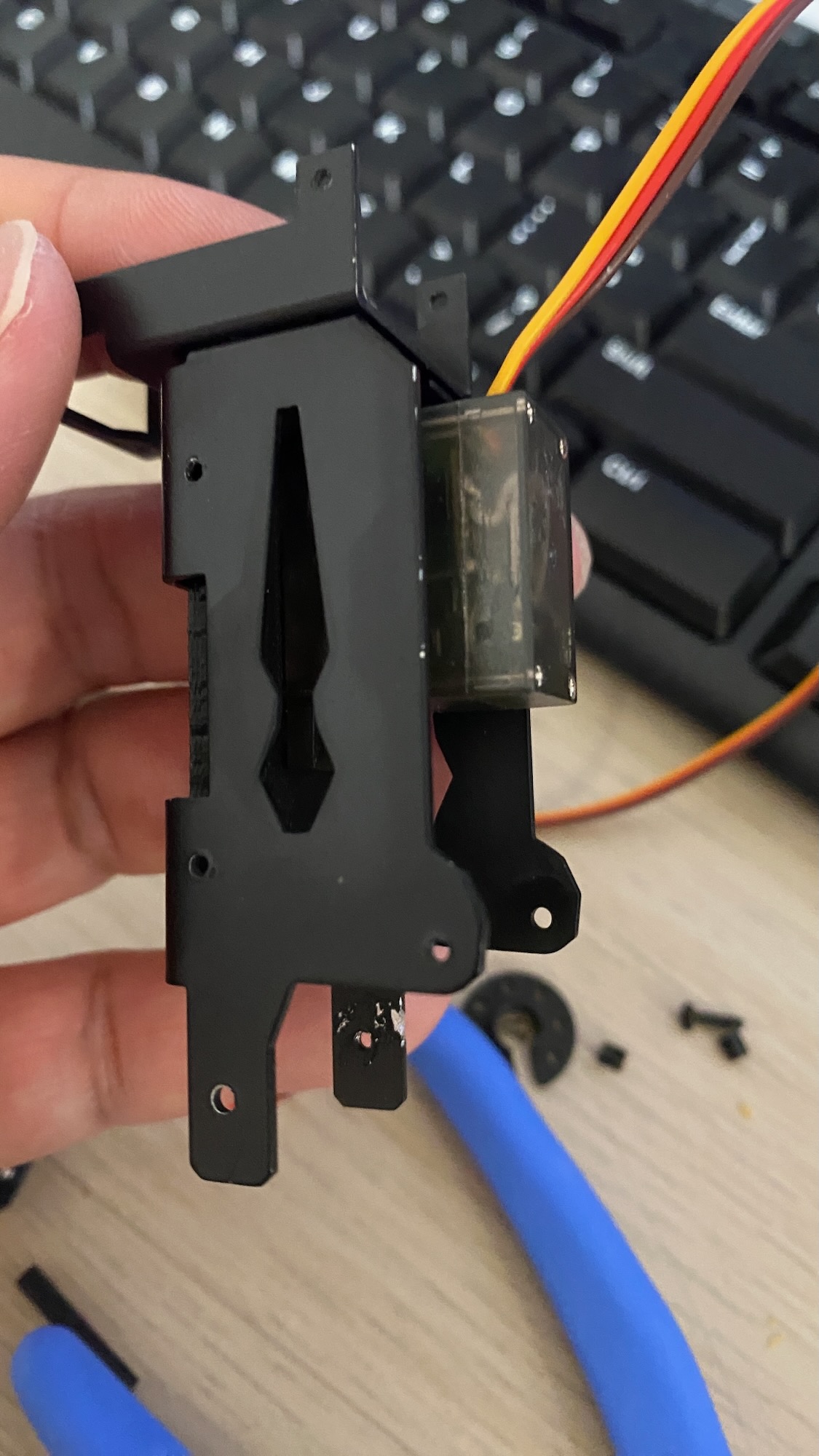
🟧 下一步就是檢查機體上 24 隻 Servo 有否故障,經過檢查發現有一顆位於屁股的 Servo 掛了(已定Pin號為04),拆了出來看看能否維修得到,可惜我暫時沒有這個功力,所以只好考慮替代方案:
方案 1. 將躹躬用(已定Pin號為11)的跟屁鼓用的 Servo 交換,這會廢了躹躬的 DOF 以及兩者的 Servo 其實是不同型號的。
方案 2. 兩個屁鼓 Servo 都拆掉,改用 MG90D,不過這就要自行設計 3DP 組件以便連接不同形狀的 Servo。
方案 3. 買一隻 Futaba RS304MD,最省功夫、不過也要等得比較久…
* 最後竟然有第 4 個方案,就是到 Amazon JP 買過期雜誌從中取得 RS304MD-DF ^_^


🟧 然後就是計劃如何改裝了…
我打算分幾個階段去進行,大家也可以因應需要選自己需要的階段便可 ^_^
第 1 階段:機體作基本維修、更換 Servo 控制板及電池,這樣只需在新的編寫動作軟件努力一下就可以讓機械人活過來了!
第 2 階段:Servo 控制板連接 ESP32 之類的控制板,並在 ESP32 上建立網頁伺服器,這樣就可以透過電腦、手機、Apple Watch 瀏覽機體的控制網頁或控制各 Servo 的角度或運行之前己編定的動作。
第 3 階段:在外置電腦、Raspberry Pi、Jetson Nano 內編寫 Python 程式,透過 OpenCV 辨識一些手勢去遙控機械人運行編寫的動作。(此部分大約就是 Python 程式透過 OpenCV 辨識使用者手勢>傳送指令到機械人內的網頁伺服器>機械人的 ESP32 控制板請 Servo 控制板執行己編定的動作或各 Servo 的角度。
可參考我之前做的類似 Project https://youtu.be/8wJu33z-FMs
第 4 階段:寫個同 AI 傾計的 Python 程式代替上一階段的 OpenCV 辨識程式,根據溝通內容做指定動作。
可參考我之前做的類似 Project https://jasonworkshop.com/b20241101/
第 5 階段:其實還有的,不過太麻煩複雜不打算嚇親大家了… (我也可能會因為怕麻煩而不想做) 暗示一下… 跟 V7RC 有關的。
🟧 已決定了訂購哪一塊 Servo 控制板了,因此先根據板子上端子的排列為機體各 Servo 編個號碼方便之後的組裝以及編寫動作工作。
🟡 Day02 – 9 Mar 2025
🟧 今天上網買零件了,當中包括:
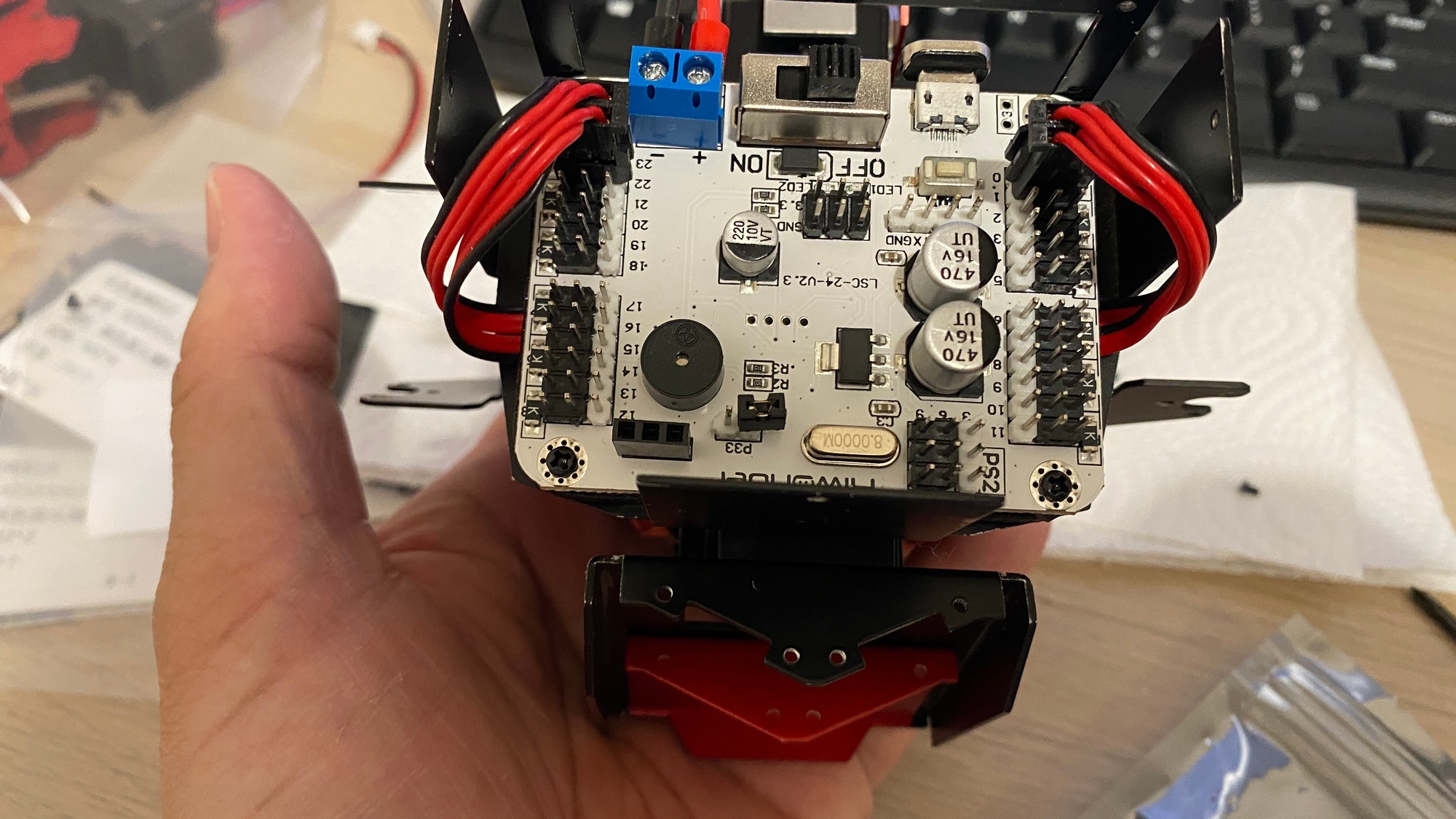
1. 24 DOF 的 Servo 控制板 x 1
2. PS2 手製連接收器 x 1
3. 電池及充電火牛,最終可能會換另一種電也說不定 x 1
4. MG90D Servo x 2
5. 各式的螺絲 x N
6. 尼龍索帶 x N
* 然後就是等貨到,暫時這邊休息幾天,要先回到軟件開發部工作了…

🟡 Day03 – 10 Mar 2025
🟧 老友一言驚醒夢中人,我竟然沒有想過找舊雜誌實在太笨,最後去了 Amazon JP 買到內附 RS304MD-DF 的 Robo Xero 舊雜誌,不過據估計最快也要 17 天後才送到… 要我等這麼久很難受呀 x_x
* 壞消息1 幾個小時後、我的訂單被取消了…
* 壞消息2 有另一隻 Servo 處於半死狀態…
唯有改變策略嘗試轉用 MG90D 吧…
🟡 Day04 – 11 Mar 2025
🟧 先整理一下現時的計劃
❌ Servo 04 應該是因為電機掛了所以就很難救了
❌ Servo 22 轉到某個角度就會無力估計是齒輪損壞了
❌ 看來能買到 RS304MD 的機會也不大
這樣的話就損失了兩隻 Servo 了 x_x
⭕ 幸好想到個辦法就是將 04 的齒輪換給 22,成功修理好 22 號了!
⭕ 然後思考了一下,究竟壞了的 04 應該換哪隻去替代呢?最後決定把 06 換過去,06 的位置則換成 MG90D,甚至 17 也可以換成 MG90D,這樣對機體的影響應該最少了吧…

🟡 Day05 – 12 Mar 2025
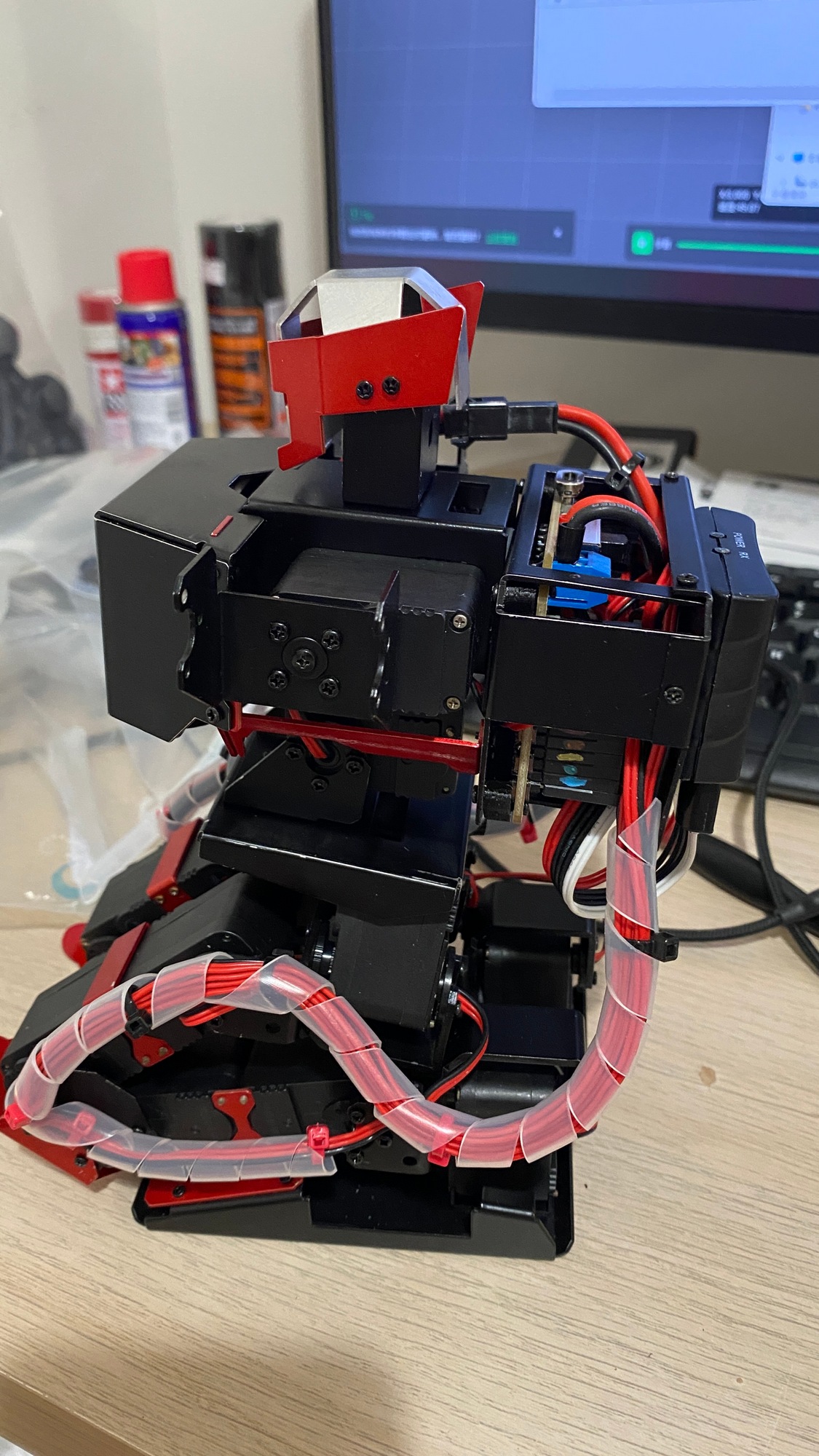
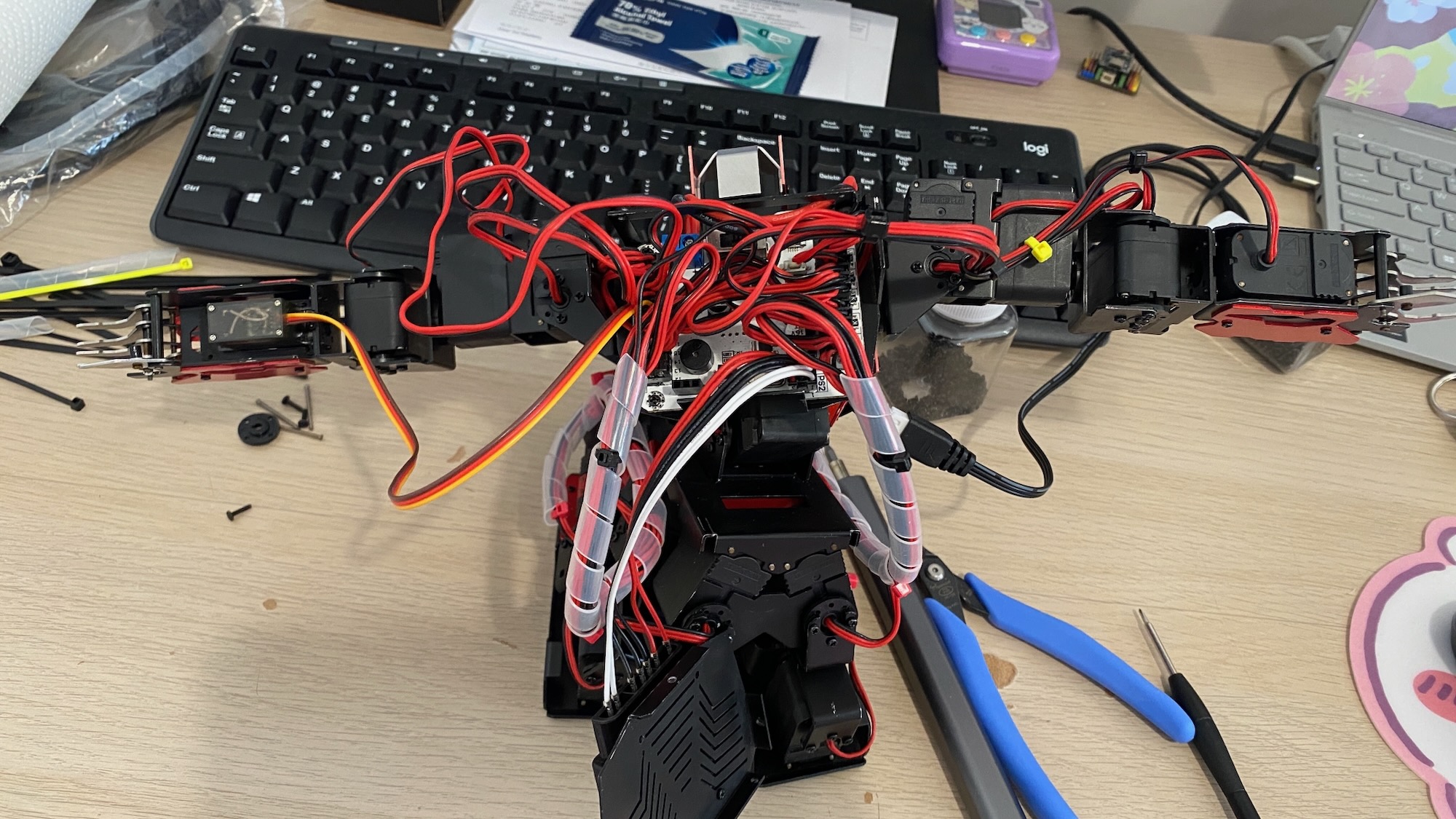
🟧 今天收到新的控制板以及電池,所以機械人的重組工作終於可以開始了!
以下重組時的注意事項:
1. 先測試新的控制板是否真的能控制到各 Sero
2. 拆卸前需要以不同角度拍攝大量的相片以免無法還原
3. 可重用的螺絲就用 WD-40 除锈,太細的螺絲直接替換掉
4. 一邊清潔一邊重新組裝



🟡 Day06 – 13 Mar 2025
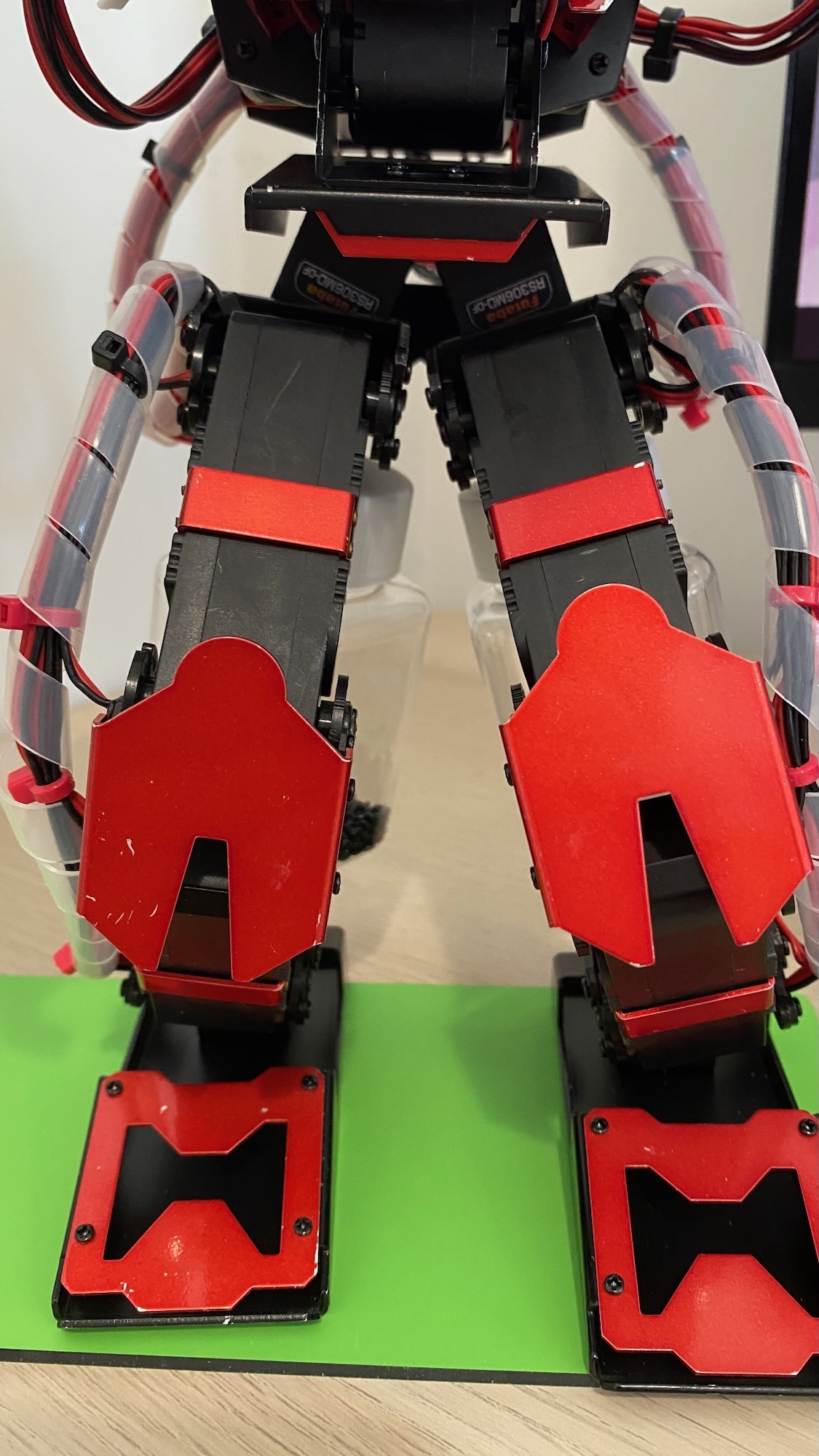
🟧 今天繼續雙腳的維修,主要都是大量的心機以及耐性,沒有太大的難度。





🟡 Day07 – 14 Mar 2025
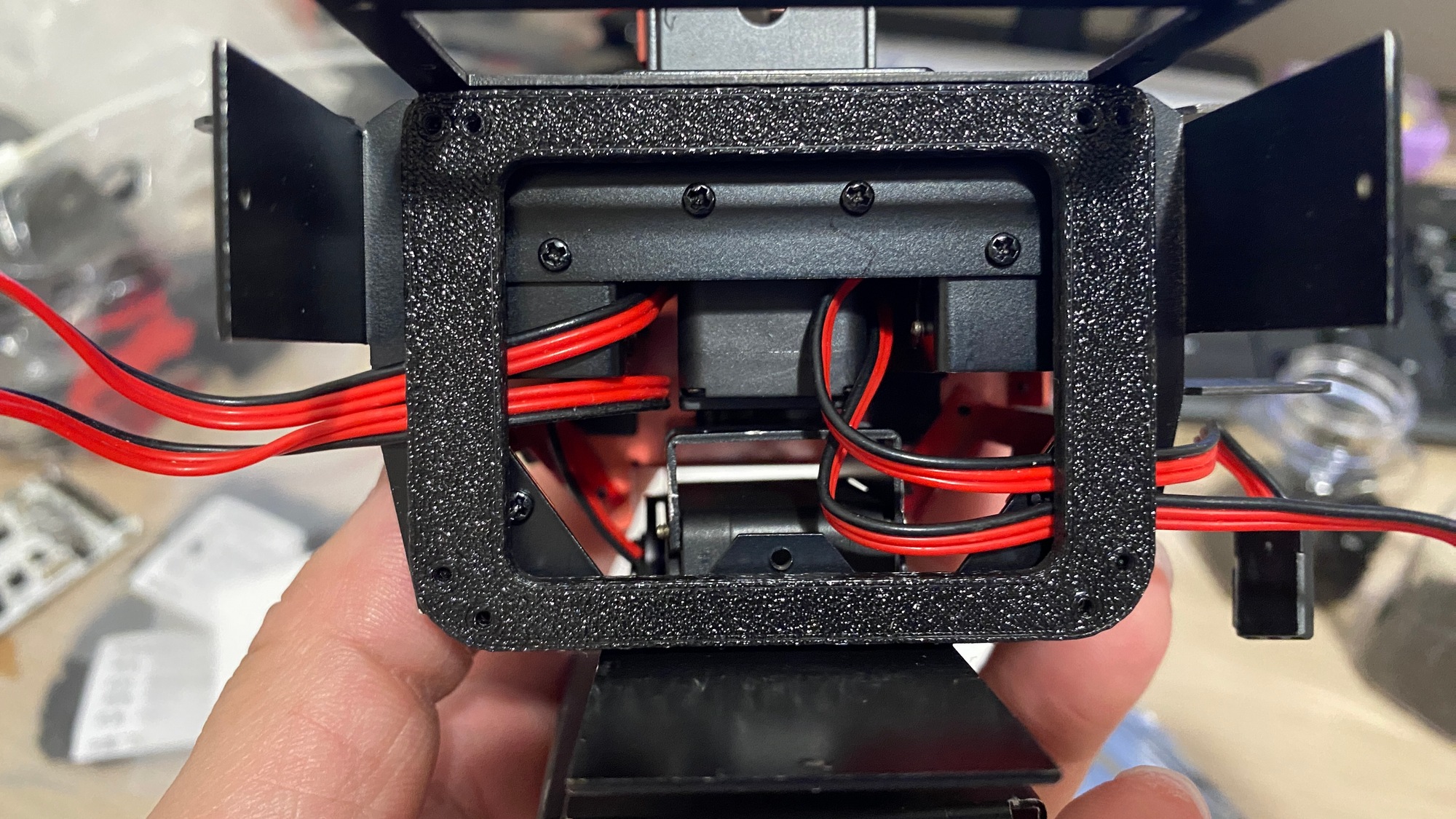
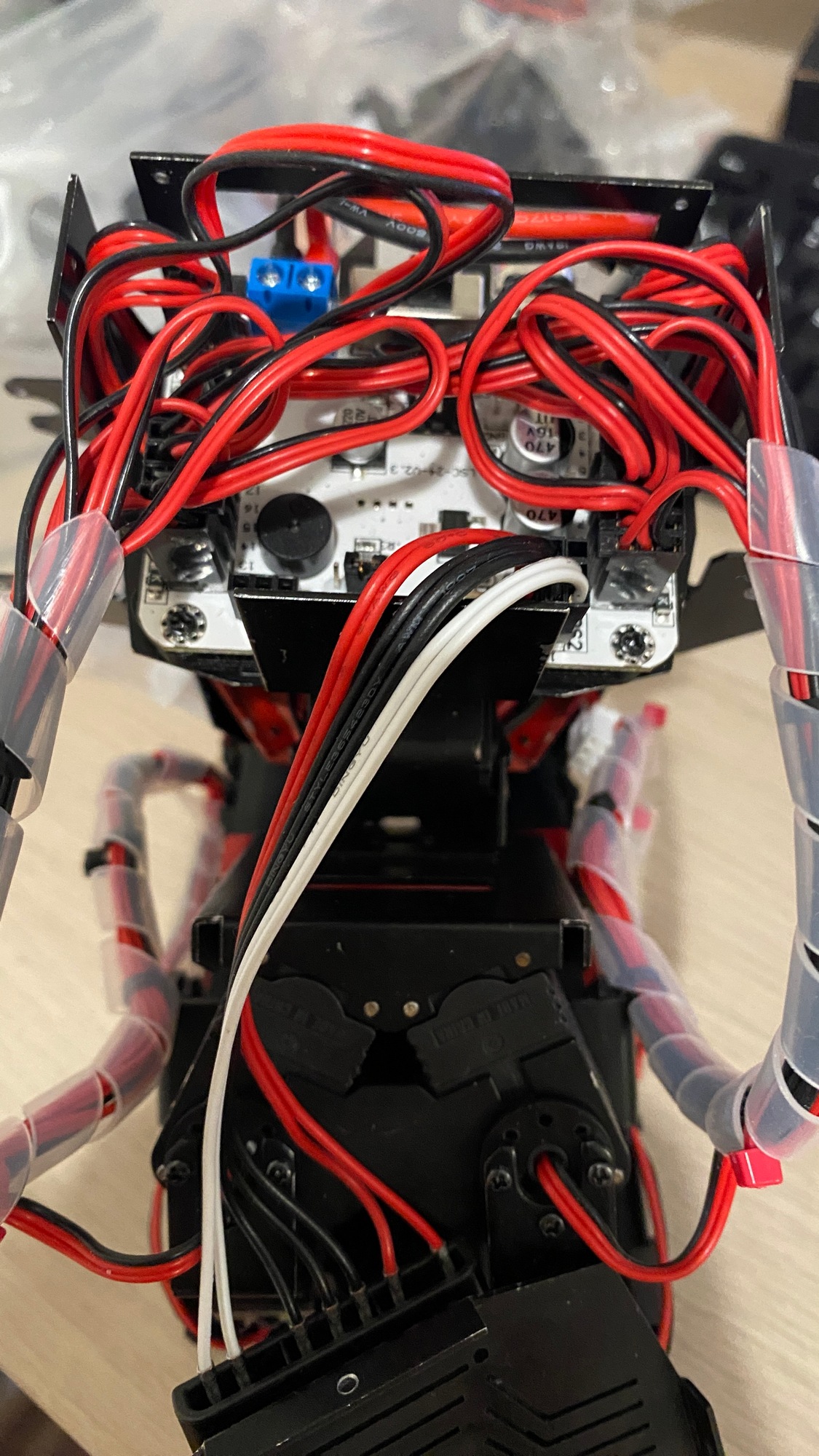
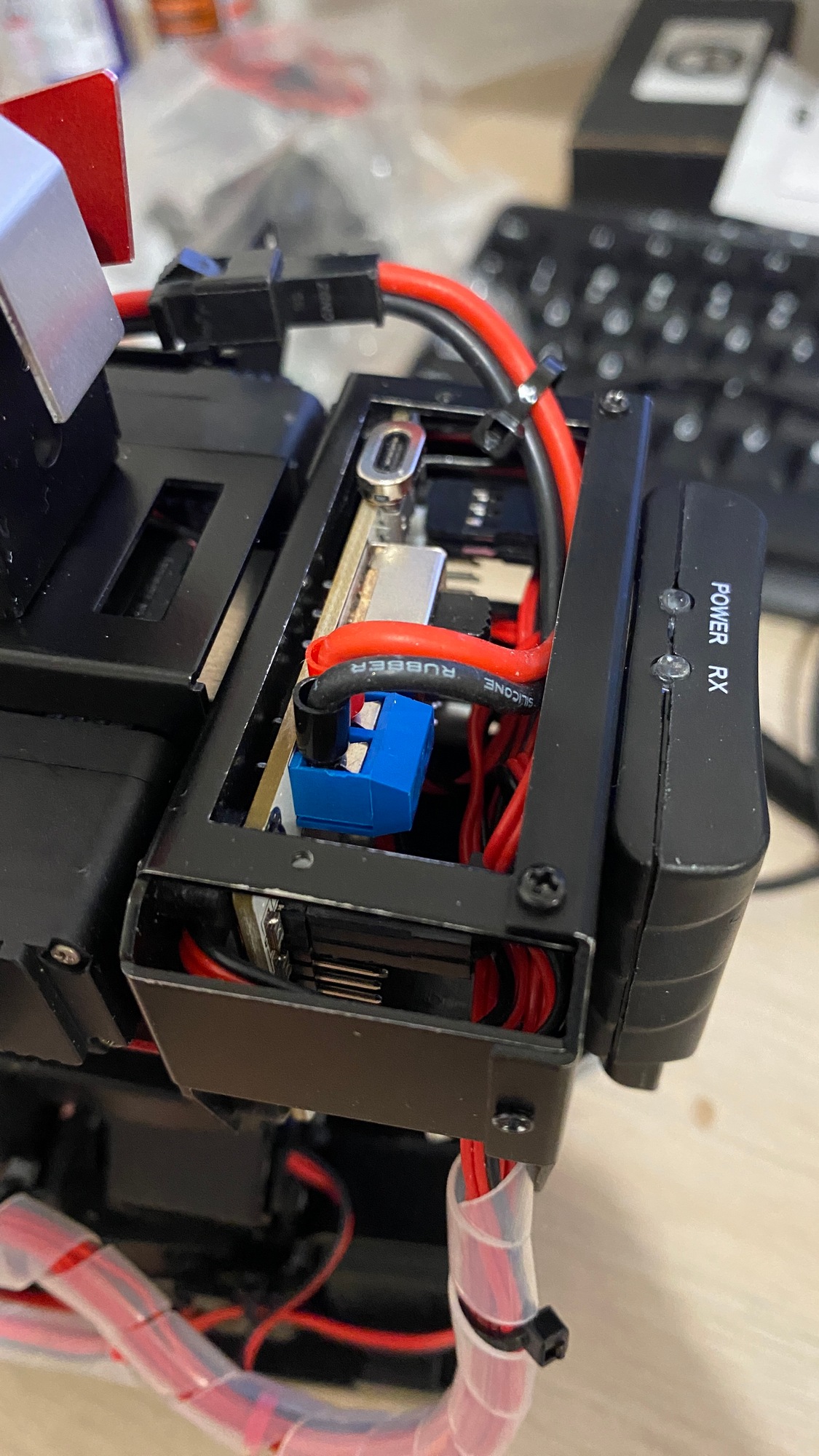
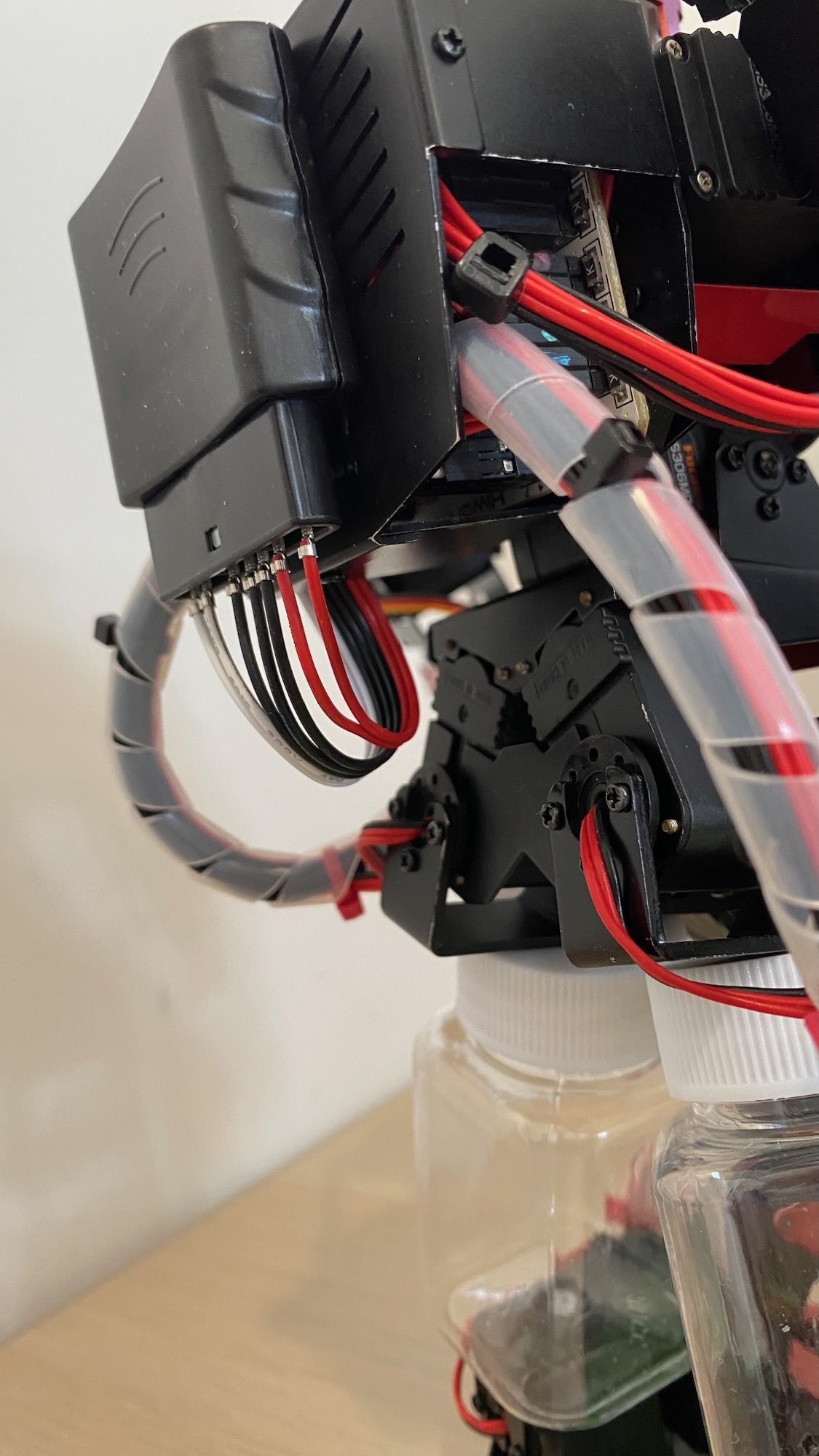
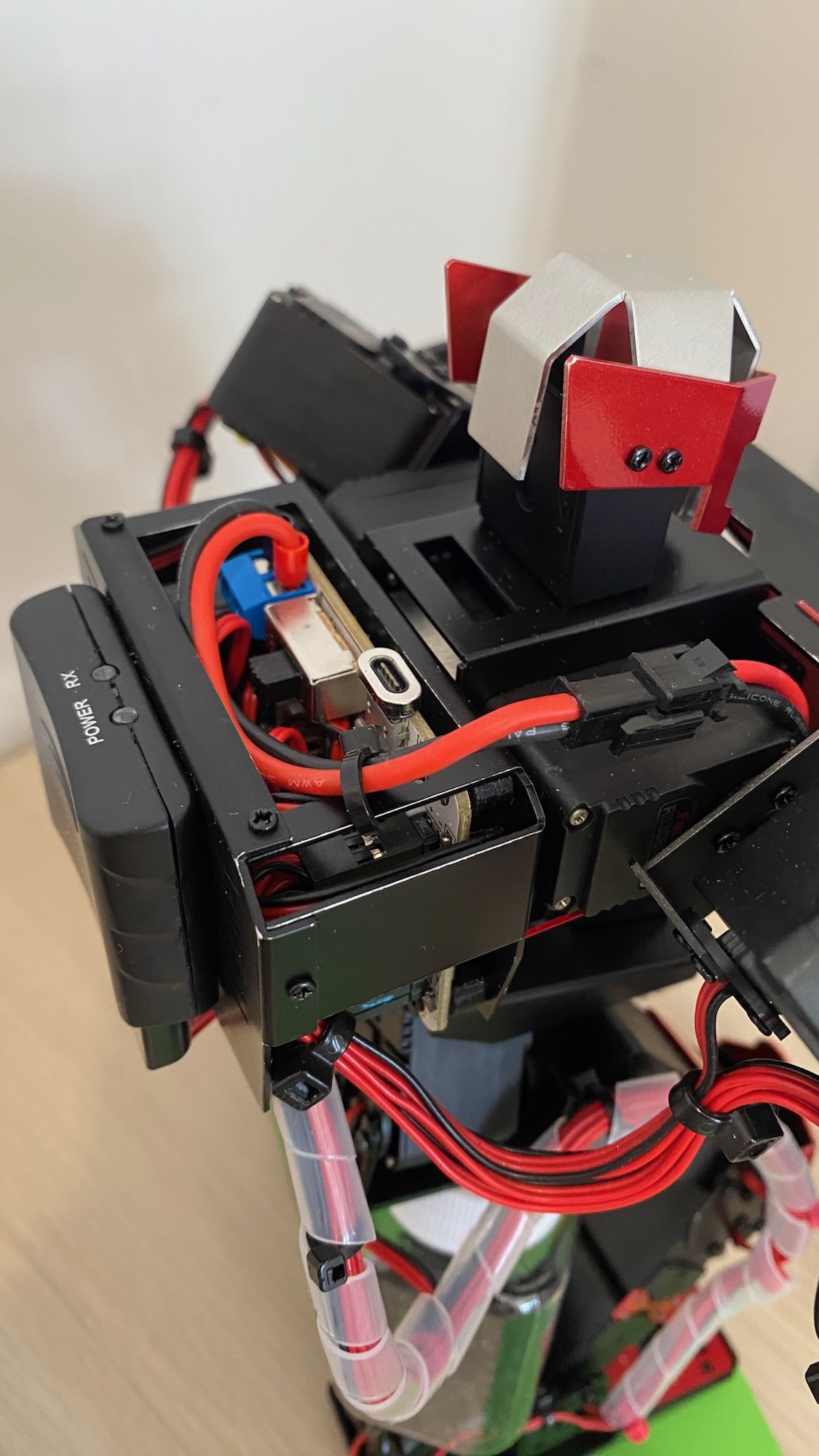
🟧 因為不太滿意控制板轉換器太厚,為了節省 2mm 的厚度,所以我決定拆散腳部電線重新整理,也順道安裝好 PSx 手掣的接收器。


🟡 Day08 – 15 Mar 2025
🟧 今天原定目標是維修雙手,由於在重組手指上卡關,最後花了大半天只能修理好右手,要怪自己在拆卸前拍的參考照片不足所致。



🟡 Day09 – 16 Mar 2025
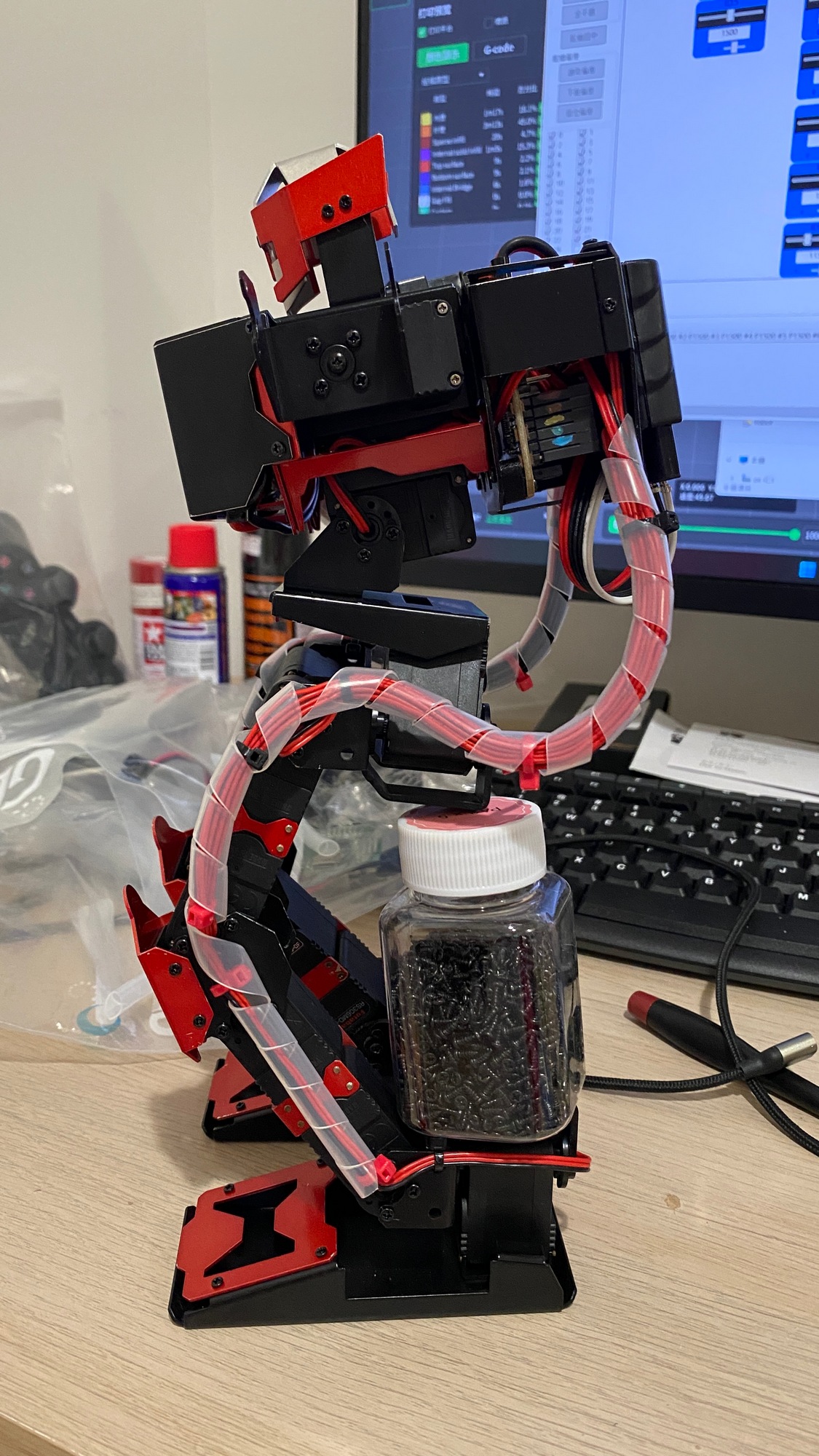
🟧 今天終於完成了整台 Xero 的拆卸、清潔、整理、重修的工作了,也讓我了解到很多設計上的巧思以及伏位。











🟡 總結
🟧 第一階段的硬件改造完成了! 這樣就可以用新的軟件以簡單的方式硬寫動作檔,適合不太多熟編程的朋友。現在就作一個簡單的總結好讓大家參考:
😸 改造過程:
不要以為很複雜,其實只要拆了舊的控制板、電池,換新的控制板、電池以及手掣接收器就完成了硬件上的改造。
😸 改造所需材料清單:
– Robo Xero 機體(最好五金件及Servo完好無缺) x 1 (無價)
– Hiwonder 24 路舵機控制板 + 手掣 x 1 組 (約 HK$200)
– 7.4V 20C 鋰電池 及 充電器 x 1 組 (約 HK$130)
以下為非必要的材料
– M1.7×3 螺絲 x 1包 (約 HK$3)
– M2x3 螺絲 x 1包 (約 HK$3)
– MG90D Servo x 1 (約 HK$17)
– 索帶 x 1 包 (約 HK$12)
🟧 硬件改造完成後,軟件以及動作檔的編寫就留待下一個 post 講解吧!