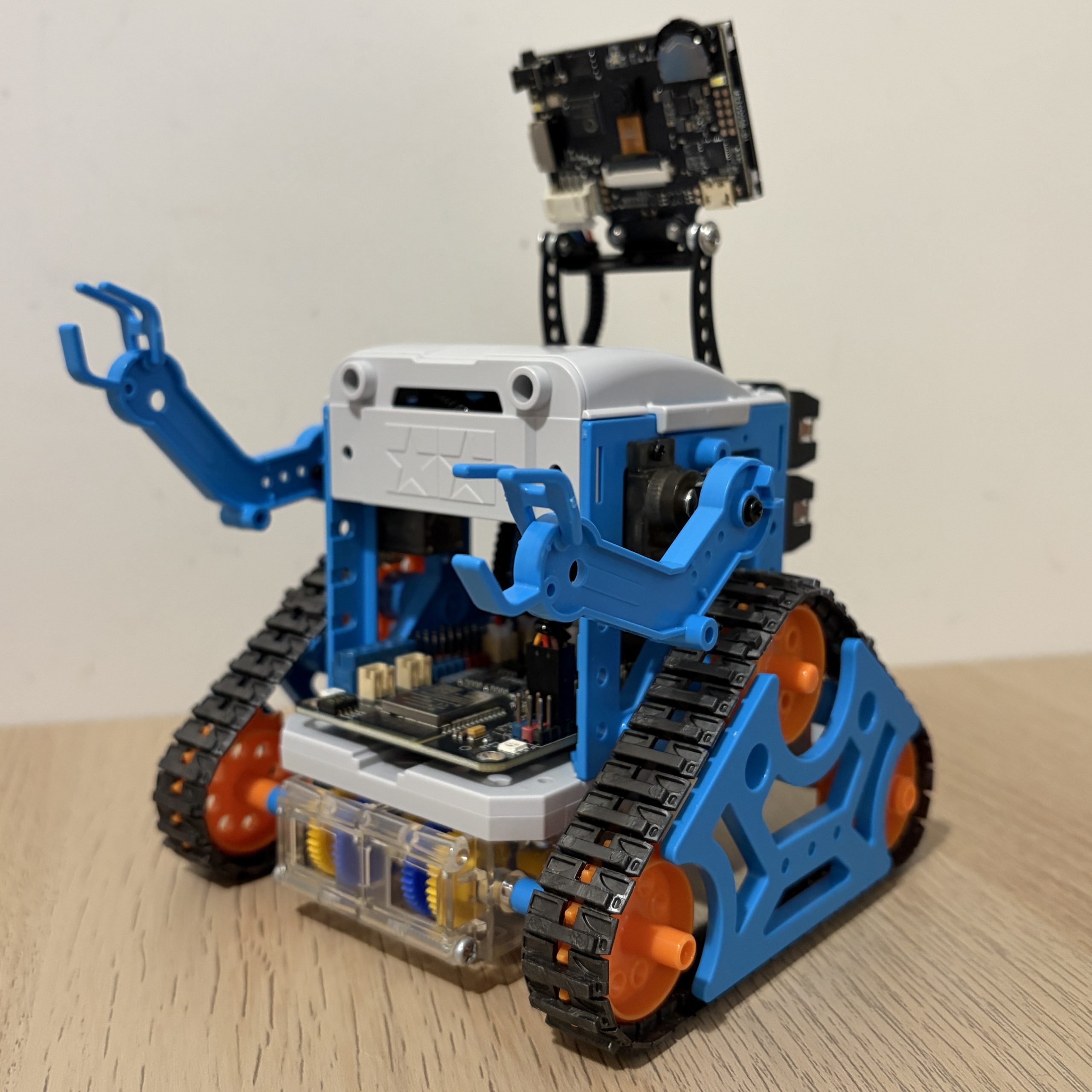
這是以 Jason Workshop 2026 年新技術復修的第一件作品 —— Q1 Tamiya 10。
這次的目標不僅僅是修復,更是要將 Jason 的新經驗結合到這台經典的履帶機器人中,讓它具備 AI 視覺與無線操控的能力。
改良重點
這次的改裝主要集中在電子系統的全面升級。為了適應 Tamiya 10 緊湊的內部空間,我重新設計了整個佈局,並導入了最近學到的新技術。
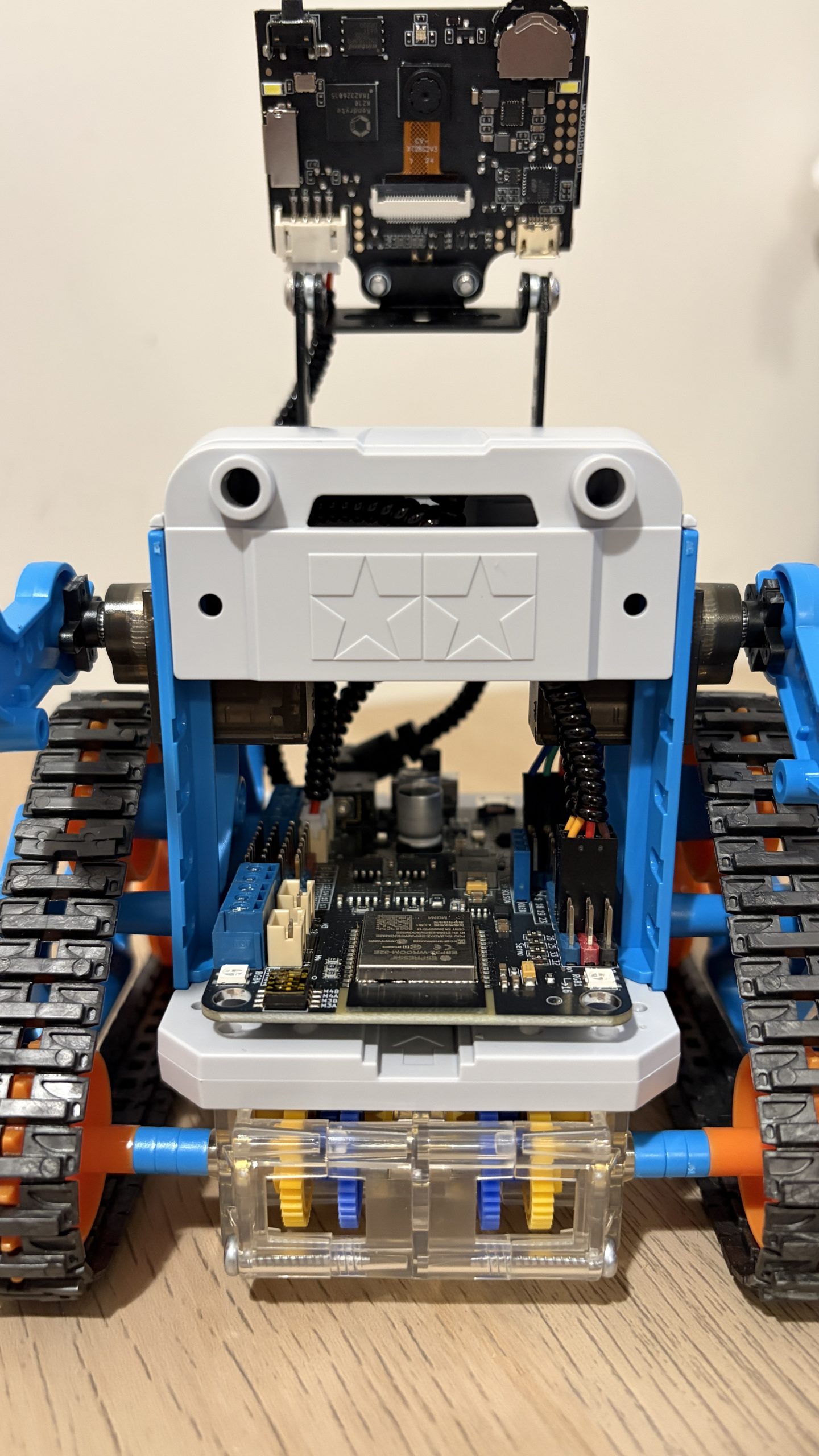
控制板採用了 ESP32 WROOM 及內置 Motor Driver
將 ESP32 WROOM 與馬達驅動晶片整合在同一塊板子上,節省了大量空間,讓內部結構更加整潔。
能以 PS4 手掣遙控
終於實現了用 PS4 手掣進行藍牙遙控!操控手感遠勝紅外線或無線電遙控。
最重要的是磨菇掣的解像度大幅提升、L R 能 Analog 輸入、還可以取得手掣的傾斜角度數據。
AI 視覺與自動化
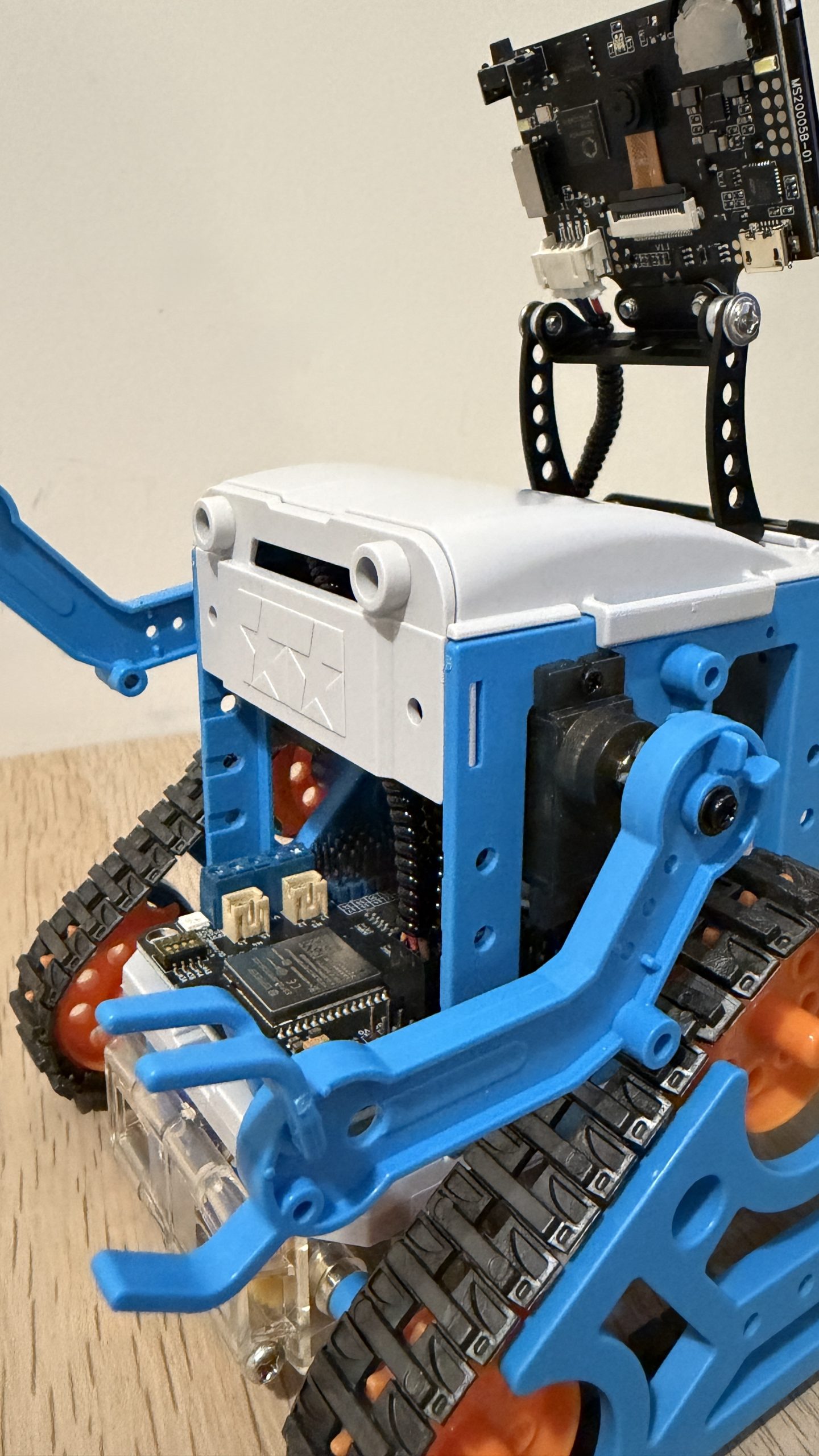
為了讓它不僅僅是一個遙控玩具,我加上了 HuskeyLens AI 視覺模組。這讓 Q1 tamiya 10 能夠進行簡單的視覺任務,例如:
人臉辨識跟隨 (Face Following)
AI 循線行走 (Line Tracking)
特定物件追蹤 (Object Tracking)
電源與佈線優化
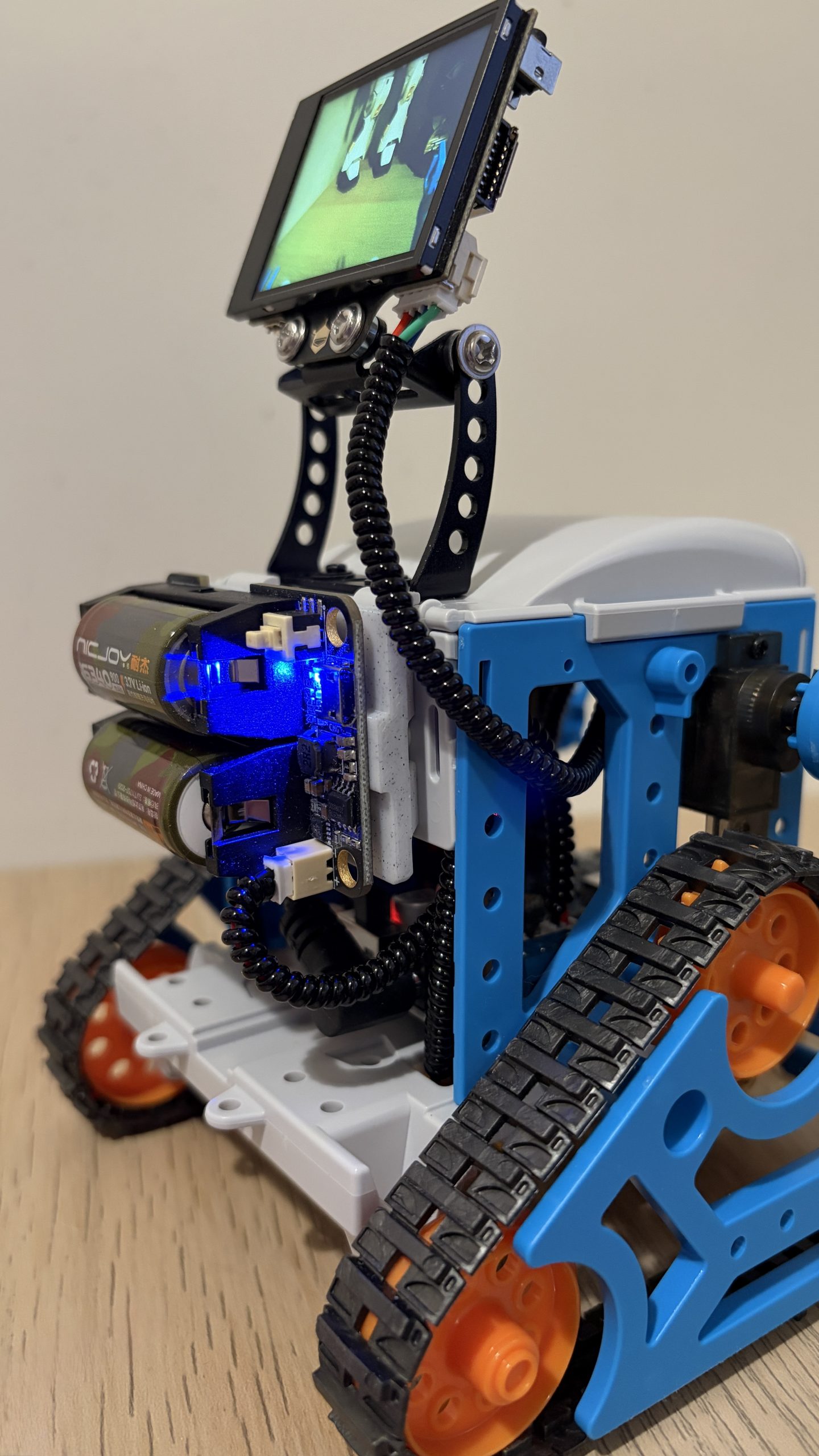
以往的作品往往更換電池都比較麻煩,這次我特別採用了新的電池模組。現在可以非常方便地更換 16340 鋰電池,不僅續航力提升 (因為為可以不停換電嘛),也更方便攜帶上飛機 (符合航空安全規範)。 此外,整體的佈線也經過重新規劃,比以前更加美觀、整齊,減少了電線干涉機械結構的風險。
後續計畫
硬體改造部份已經完成,目前還在改善程式之中。主要是在改良 PS4 手掣操控以及 HuskeyLens 的 AI 相關功能。
本篇仍會持續更新,敬請期待!