我又有一個瘋狂的想法了!
▊2021年11月16日
對上一次十四天挑戰得到大家熱烈的關注實在令 Jason 感到意外、面紅心跳、整個人都在燃燒(精神上)!
為了讓之後設計的機械人更完美,所以就需要在收藏電線這個重大課題下點功夫了。
剛好最近需要製作一組東西,而機械臂是這東西的一個重要部份,
不如就用十四天時間,由零開始設計及製作一台機械臂吧!
▊2021年11月17日 – 星期三 (Day 01)
這台機械臂的設計主軸如下:
1. 連機械夾共 6 DOF
2. 伺服馬達電線需要收藏好 (對 Jason 來說超難!)
零件方面需要:
串聯的 Servo Motor x 6 (會多買1顆作後備)
Control Board x 1
電池 7.4V 20C x 1
充電器 x 1
雖然已經下了單,不過應該需要四五天才收到貨,就先畫好初稿吧 ^_^
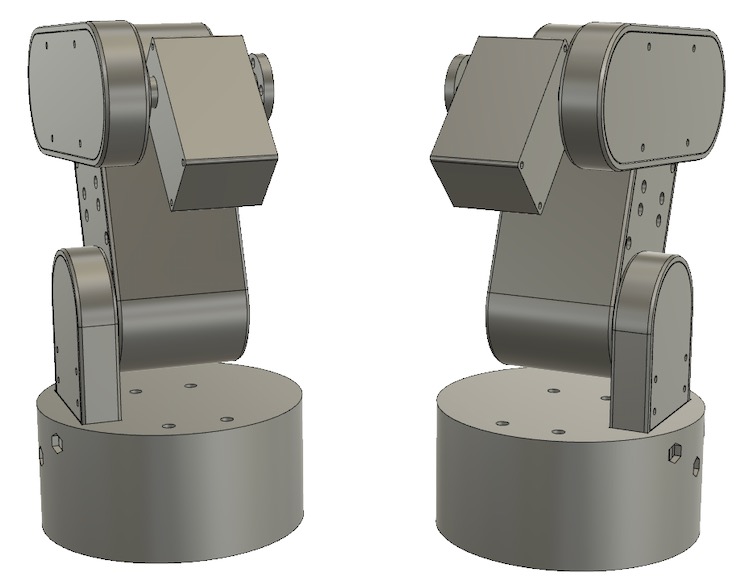
▊2021年11月18日 – 星期四 (Day 02)
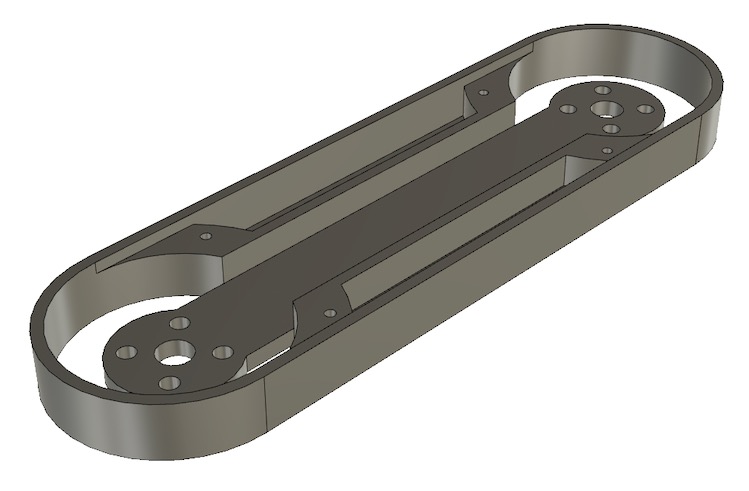
今次的設計跟以往 Q1 arm 系列有很大的分別,主要原因是為了方便藏線及組裝,另外我也發現很多醫療設備都是以這類方式連接,相信是這種設計的 Gap 位比較少有關吧 ^_^
▊2021年11月19日 – 星期五 (Day 03)
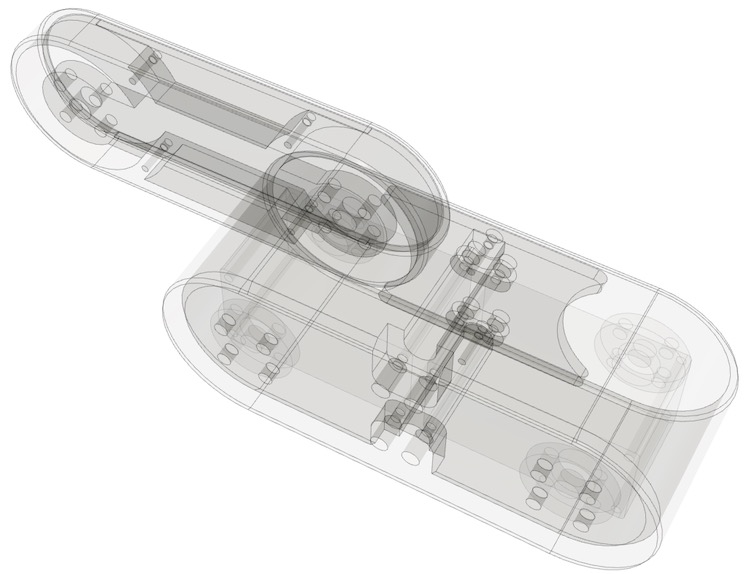
既要藏線,又要容易列印,又要有足夠強度,又要容易組裝… 很困難,但很好玩!

▊2021年11月20日 – 星期六 (Day 04)
因為今次的組件都比較大,本來已設計好的 arm2 組件花了六小時才印得完。
雖然在藏線上算是成功,但 Jason 竟然忘記考慮機這款伺服馬達無法穩定地承受太長的機械臂所產生的扭力,為了增加穩定性所以要將組件設計得短一點或使用更強的伺服馬達。

▊2021年11月21日 – 星期日 (Day 05)
今天根據實驗失敗的結果重新設計 arm2 組件,目標是完成設計及列印 arm2 以及 arm1 兩件組件才能勉強追得上進度 x_x 要更努力才行呀!

進度報告:
1. 購買電池方面又出問題,雖然應該解決得到,但電池可能會比伺服馬達及控制板晚幾天才送到 x_x
2. arm1 arm2 的組件都畫好了,明天應該可以印好,目前完成度大約為15%

▊2021年11月22日 – 星期一 (Day 06)
arm1, arm2 總算完成也實際地測試了一下,應該還有少少的地方需要修改,今天的目標是完成 base 組件的繪畫。
▊2021年11月23日 – 星期二 (Day 07)
企劃來到一半的時間,組件繪製的進度大約去到 50%,而印製進度只去到 33%,又開始令 Jason 緊張起來了!
重新訂購的電池竟然比其他零件早送到,實在不知說甚麼好了 ^_^
▊2021年11月24日 – 星期三 (Day 08)
所有電子類零件總算到齊了!今天就先完成伺服馬達的測試及校正作業吧!
▊2021年11月25日 – 星期四 (Day 09)
今天因為有臨時保姆任務在身,只能停工一天 x_x
▊2021年11月26日 – 星期五 (Day 10)
進度雖然有點落後,趕不上的時間就用勇氣同熱血去補上吧!



▊2021年11月27日 – 星期六 (Day11)
來到今天才突然想讓機械臂的組件可以隨時左右互換也順便改良一些小問題,所以又重新繪畫過所有圖檔及正在重印之中… 本來已經很趕急的進度又再加急了 x_x 我要燃燒小宇宙才行!
▊2021年11月28日 – 星期日 (Day12)
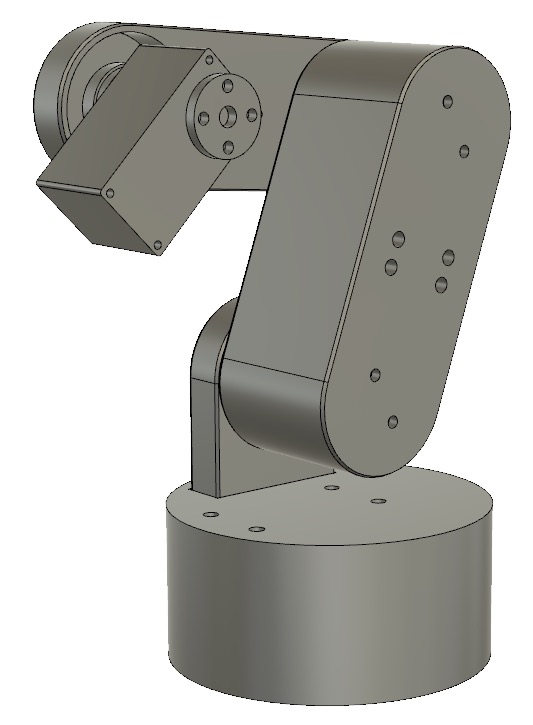
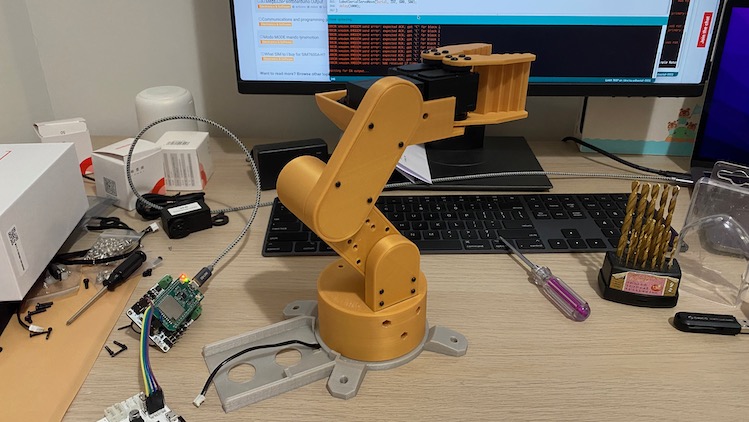
機械臂的主體已經大致完成,也順利完成了初步的功能測試,只是夾的部份太大了,將來看看能否縮小這個部份吧 ^_^

▊2021年11月29日 – 星期一 (Day13)
今天要去替某位大人物修理玩具,所以沒法抽時間進行十四天挑戰,不過得到那位大人物的表揚實在多辛苦也值得 ^_^
▊2021年11月30日 – 星期二 (Day14)
經過十四天的努力總算完成了這台機械臂了!
歡迎大家來看看 ^_^